Назначение преобразовательного устройства (электрического преобразователя) в электроприводе. Примеры электрических преобразователей.
Преобразовательное устройство — это преобразователь электри-
ческой энергии. Эти устройства применяются в регулируемом элек-
троприводе для целенаправленного и экономичного изменения па-
раметров движения электропривода: скорости, момента и др.
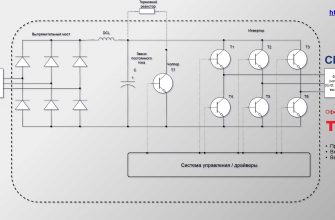
Электрическое преобразовательное устройство (ПР) обычно пред-
ставляет собой преобразователь, выполненный на силовых полупро-
водниковых приборах: неуправляемых (диоды) и управляемых (на-
пример, тиристоры, запираемые тиристоры, биполярные транзисто-
ры с изолированным входом IGBT).
Назначение электромеханического преобразователя в электроприводе. Примеры электромеханических преобразователей.
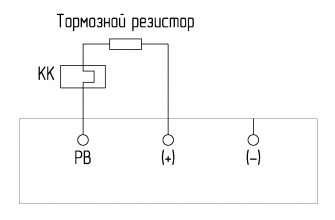
Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии, поставляемой источником (сетью) и характеризуемой напряжением Uс и током Iс сети, в электрическую же энергию, требуемую двигателем и характеризуемую величинами U, I. Преобразователи бывают неуправляемыми (трансформатор, выпрямитель, параметрический источник тока) и чаще – управляемыми (мотор-генератор, управляемый выпрямитель, преобразователь частоты), они могут иметь одностороннюю (выпрямитель) или двухстороннюю (мотор-генератор, управляемый выпрямитель с двумя комплектами вентилей) проводимость. В случае односторонней проводимости преобразователя и обратном (от нагрузки) потоке энергии используется дополнительный резистор R для “слива” тормозной энергии.
Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М,  ) и
) и
Назначение механического преобразователя в электроприводе. Примеры механических преобразователей.
Механический преобразователь (передача) – редуктор, пара винт-гайка, система блоков, кривошипно-шатунный механизм и т.п. осуществляет согласование момента М и скорости двигателя с моментом Мм (усилием Fм) и скоростью wм рабочего органа технологической машины.
Величины, характеризующие преобразуемую энергию, – напряжения, токи, моменты (силы), скорости называют координатами электропривода.
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса.
Управление координатами должно осуществляться в пределах, разрешенных конструкцией элементов электропривода, чем обеспечивается надежность работы системы. Эти допустимые пределы обычно связаны с номинальными значениями координат, назначенными производителями оборудования и обеспечивающими его оптимальное использование.
В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться потери  Р во всех элементах и к рабочему органу должна подводиться требуемая в данный момент мощность.
Р во всех элементах и к рабочему органу должна подводиться требуемая в данный момент мощность.
Дата добавления: 2018-02-15 ; просмотров: 3072 ; Мы поможем в написании вашей работы!
Источник
Классификация электропривода




Общие сведения об электроприводе
История развития электропривода
Первый электрический привод был осуществлен в 1838 г. петербургским академиком Б. С. Якоби, который на основе разработанного им в 1834 г. двигателя постоянного тока с вращающимся валом использовал его с питанием от гальванической батареи для привода гребных колес прогулочного катера. Вместе с тем, отсутствие экономически целесообразных источников электрической энергии не позволяло на том уровне развития электрического привода использовать его в производстве.
По существу электрический привод стали внедрять в производство и заменять им тепловой и другие приводы машин и механизмов после разработки русским инженером-электротехником М. О. Доливо-Добровольским в 1889-1891 гг. системы производства, распределения и потребления трехфазного переменного тока, в том числе разработки им трехфазного асинхронного двигателя. Очевидные экономические преимущества централизованного производства электроэнергии трехфазного переменного тока и простота ее распределения привели к тому, что электрический привод, постепенно вытесняя другие виды привода машин и механизмов, занял главенствующее место во многих отраслях народного хозяйства.
Исторически сложилось так, что электрический привод из-за своего исключительного значения и широкого распространения, в результате которого на долю ЭП приходится потребление свыше 60 %вырабатываемой в стране электроэнергии, выделен из общих технологических электроустановок для отдельного рассмотрения.
Электрический привод
Электрическим приводом называют электромеханическую систему, состоящую в обобщенном виде из электродвигательного, преобразовательного, передаточного и управляющего устройств и предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением (рис. 1.1).
Основное назначение электропривода как технологической электроустановки – преобразование электрической энергии в механическую энергию движения исполнительных органов машин и механизмов. В отдельных случаях при реализации генераторных режимов торможения возможно и обратное преобразование энергии.
Электродвигательное устройство обеспечивает непосредственное преобразование электрической энергии в механическую.
Преобразовательное устройство осуществляет преобразование электрической энергии источника в необходимый для электродвигательного устройства вид. В простейшем случае функции преобразовательного устройства в электроприводе выполняет различного рода коммутационная аппаратура: контакторы, магнитные пускатели, тиристорные коммутаторы и т. д. В более сложном случае – управляемые полупроводниковые преобразователи: выпрямители, регуляторы напряжения, преобразователи частоты и т. д.
Рис. 1.1. Функциональная схема автоматизированного электропривода:
М – электродвигательное устройство; ПРБ – преобразовательное устройство; ПРД – передаточное устройство; УУ – управляющее устройство.
Передаточное устройство механическую энергию электродвигательного устройства преобразует в вид, необходимый для потребителя механической энергии. В качестве передаточного устройства в электроприводе используют муфты, ременные и цепные передачи, редукторы. По функциональному назначению передаточное устройство сходно с преобразовательным с тем лишь отличием, что преобразовательное преобразует электрическую энергию, а передаточное – механическую.
Потребители механической энергии – это исполнительные органы рабочих машин и механизмов различных технологических установок.
Преобразовательное, электродвигательное и передаточное устройства образуют энергетическую часть электропривода.
Информационную часть электропривода представляет управляющее устройство, которое в ряде случаев классифицируют как информационно-управляющее. Оно на входе получает сигналы задания и обратных связей, а на выходе вырабатывает сигналы управления энергетической частью электропривода. В состав управляющего устройства высокого уровня включают микропроцессорные средства, микро- и мини-ЭВМ.
Важный энергетический показатель электропривода – это коэффициент полезного действия (к. п. д.), значение которого при пренебрежении сравнительно малым потреблением электроэнергии устройством управления определяется выражением
 (1.1)
(1.1)
где  ,
,  ,
,  ,
,  – соответственно к. п. д. электропривода, преобразовательного, электродвигательного и передаточного устройств.
– соответственно к. п. д. электропривода, преобразовательного, электродвигательного и передаточного устройств.
Так как значения к. п. д. преобразовательного и передаточного устройств достаточно близки к единице и мало зависят от степени нагрузки, то в целом к. п. д. электропривода определяется значением к. п. д. электродвигательного устройства. Как известно, он тоже достаточно высокий и для электродвигателей вращательного движения составляет при номинальной нагрузке 60-95 %. Меньшие значения к. п. д. соответствуют тихоходным электродвигателям малой мощности. При мощностях же свыше 1 кВт номинальное значение к. п. д. электродвигателей, а соответственно и электропривода, как правило, превышает 70 %.
Преимущества электропривода – малый уровень шума при работе и отсутствие загрязнения окружающей среды, широкий диапазон мощностей и угловых скоростей, доступность регулирования угловой скорости и соответственно производительности технологических установок, относительная простота автоматизации, монтажа и эксплуатации по сравнению с тепловыми двигателями, например внутреннего сгорания.
Классификация электропривода
По основным характерным признакам электроприводы классифицируют следующим образом.
По способу передачи механической энергии исполнительному органу технологической установки различают: групповой, одиночный, индивидуальный и взаимосвязанный электропривод. В групповом электроприводе электродвигатель приводит в движение несколько исполнительных органов одной или нескольких рабочих машин. В одиночном – один исполнительный орган. В индивидуальном – отдельные части электродвигателя представляют собой часть исполнительного органа, например двигатель и исполнительный орган в виде моторколеса. Во взаимосвязанном электроприводе несколько двигателей осуществляют привод одного исполнительного органа, например привод тягового органа протяженного конвейера несколькими электродвигателями.
По наличию механического передаточного устройства выделяют редукторный электропривод и безредукторный. В редукторном электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор. В безредукторном передача движения от электродвигателя осуществляется либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По роду тока и виду электродвигательного устройства различают электроприводы переменного и постоянного тока; асинхронные, синхронные, вентильные и др.
По принципу управления угловой скоростью и положением исполнительного органа различают электропривод: нерегулируемый, регулируемый, следящий, программно-управляемый, адаптивный. Нерегулируемый – предназначен для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий. Регулируемый – для сообщения неизменяемой или изменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства. Следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом. Программно-управляемый – управляемый в соответствии с заданной программой. Адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По виду используемого преобразовательного устройства различают электроприводы следующих систем: УВ-Д (управляемый выпрямитель – двигатель), ШИП-Д (широтно-импульсный преобразователь – двигатель), МУ-Д (магнитный усилитель – двигатель), ТРН-АД (тиристорный регулятор напряжения – асинхронный двигатель), ПЧ-АД (преобразователь частоты – асинхронный двигатель) и др.
По степени (уровню) автоматизации электропривод может быть: неавтоматизированным, автоматизированным и автоматическим. Неавтоматизированные электроприводы – с ручным управлением, в производственных процессах по требованиям обеспечения безопасности производства не используют. Автоматизированные электроприводы – управляемые автоматическим регулированием параметров; наиболее распространены асинхронные электроприводы мощностью до 200 кВт с синхронными частотами вращения от 750 до 3000 об/мин, которые имеют невысокую стоимость, просты в монтаже и эксплуатации и обладают повышенной надежностью по сравнению с другими типами электроприводов. Автоматические электроприводы – в которых управляющее воздействие вырабатывается автоматическим устройством без участия оператора, обеспечивают гибкое управление технологическими процессами и их полную автоматизацию на основе аппаратных либо программных средств.
1. Шичков Л.П. Электрический привод. — М.: КолосС, 2006. – 279 с.: ил. – (Учебники и учеб. пособия для студентов высш. учеб. заведений) .
2. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. – 6-е изд., доп. и перераб. – М.: Энергоиздат, 1981. – 576 с., ил.
Источник
Тема 1.10. Основы электропривода.
Электрический привод представляет собой электромеханическую систему , предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением.
В общем случае электропривод состоит из 4-х устройств:
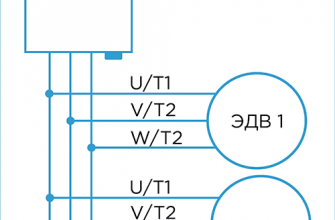
Преобразовательное устройство предназначено для преобразования рода тока, напряжения и частоты тока питающей сети и передачи преобразованных параметров сети в электрическую часть электропривода. Поэтому оно включается между питающей сетью и электрической частью электропривода.
Структурная схема электропривода
В качестве преобразовательных устройств используются:
для преобразования рода тока – выпрямители , преобразующие переменный ток в постоянный;
для преобразования напряжения – трансформаторы , преобразующие переменное напряжение одного значения в переменное напряжение другого значения той же частоты;
для преобразования частоты тока – преобразователи частоты, преобразующие переменный ток одной частоты в переменный ток другой, регулируемой частоты.
для преобразования напряжения – инверторы , преобразующие постоянное напряжение в пременное регулируемой амплитуды и частоты
Рассмотрим поочередно преобразовательные устройства.
Выпрямители
На судах выпрямители применяют в электроприводах, использующих в качестве источника механической энергии двигатель постоянного тока. К таким электроприводам относятся (в оснвном на судах старой постройки):
якорно – швартовные механизмы – брашпили;
грузоподъёмные – грузовые лебёдки и краны;
гребные электрические установки, предназначенные для движения судна.
Мощность этих электродвигателей составляет десятки и сотни кВт.
Трансформаторы
Трансформаторы в судовых электроприводах, как правило, не применяются. Однако они нашли применение на берегу. Здесь от высоковольтных линий электропередач с напряжениями в сотни киловольт питаются предприятия с электроприводами напряжением 380В и 660В.
Преобразователи частоты
На судах статические тиристорные преобразователи частоты применяются в электроприводах переменного тока. К таким электроприводам относятся, в основном, грузоподъёмные тяжеловесные устройства и гребные электрические установки.
Электродвигательное устройство предназначено для преобразования электрической энергии в механическую или, в некоторых системах судовых электроприводов (система генератор – двигатель), механической энергии в электрическую.
К электродвигательным устройствам относят электродвигатели постоянного и переменного тока, а также универсальные ( переменно-постоянного тока ). Последние нашли на судах ограниченное применение, в основном, в электроприводах вентиляторов мощностью до 250…300 Вт.
Передаточное устройство предназначено для передачи механической энергии от электродвигателя к исполнительному органу механизма.
К передаточным устройствам относят механические, гидравлические и другие передачи. Передаточные устройства применяют в грузоподъёмных, якорно-швартовных и рулевых механизмах. Например, в электроприводе грузовой лебёдки передаточным устройством является редуктор, расположенный между электродвигателем и грузовым барабаном лебёдки.
Простейшие по устройству электроприводы, например, вентиляторы и центробежные насосы, не имеют передаточного устройства, т.к. у них крылатка насажена непосредственно на вал электродвигателя.
Управляющее устройство предназначено для управления преобразовательным электродвигательным и передаточным устройствами. При помощи управляющего устройства задают необходимый режим работы всего электропривода, например, пуск, остановку, реверс, изменение скорости и др. Например, в электроприводе грузовой лебёдки управляющее устройство состоит из командоконтроллера (с рукояткой управления) и
станции управления, внутри корпуса, которой находятся коммутационные и защитные электрические аппараты – контакторы, реле, предохранители и др.
В сложных современных судовых электроприводах составной частью управляющего устройства являются бортовые компьютеры, которые получают информацию от задатчиков и датчиков обратной связи и вырабатывают сигналы управления в соответствии с заданными алгоритмами (программами).
При этом, в качестве задатчиков используются рукоятки управления тремя механизмами крана (подъём, поворот, стрела), связанные с потенциометрами, в качестве датчиков – большое количество чувствительных элементов, измеряющих вес груза, давление в системе гидравлики величину тока, определяющих положение рабочих органов перечисленных механизмов и многое другое.
Источник