- Частотное регулирование асинхронного двигателя
- Преимущества
- Виды управления скоростями
- Принцип
- Технические характеристики для учета
- Правила регулирования частоты
- Плюсы электродвигателя с регулированием скорости
- Преобразователь частоты для асинхронного электродвигателя
- Как работают преобразователи частоты для асинхронных двигателей
- Принцип действия частотных преобразователей
- Выбор частотного преобразователя
Частотное регулирование асинхронного двигателя

Частотник или (полностью) частотный преобразователь позволяет осуществлять частотное регулирование электродвигателя. Регулирование скорости (частоты) при эксплуатации данного устройства подразумевает возможности плавного изменения частоты оборотов ротора в большую или в меньшую сторону относительно номинальной.
В отраслях промышленности такая методика важна, поскольку она обеспечивает нормальное функционирование электродвигателя в конкретных условиях его эксплуатации. Частотные преобразователи современного рынка – надежные технологичные механизмы с широким выбором функций управления асинхронными электродвигателями:
- транспортеров;
- насосного оборудования;
- вентиляторов и другой техники.
Преимущества

Главный плюс частотного преобразователя (частотного регулирования скорости) – в том, что в паре с асинхронным электродвигателем он может заменить привод постоянного тока. Именно последний механизм остается слабым звеном довольно простой схемы регулировки оборотов электродвигателя.
Электрический привод постоянного тока не отличается особой надежностью: во время эксплуатации имеет место искрение щеток, что быстро изнашивает коллектор. Во взрывоопасной среде или запыленных помещениях такое устройство использовать нельзя. К тому же его цена остается довольно внушительной.
- проще в плане конструкции;
- дешевле стоит;
- более надежен, потому что не имеет подвижных контактов;
- меньше по размеру при аналогичной мощности (проще установить, легче спланировать систему);
- легче.
Два важных преимущества асинхронных двигателей – их простое производство и неприхотливость по части обслуживания. Есть, правда, и недостатки, к которым относится сложность организации изменения скоростных характеристик электродвигателя. Здесь не подходят классические решения – изменение напряжения через дополнительные сопротивления в цепи обмоток.
Хотя теория частотного регулирования разработана еще в 30-е годы XX века, реализовать управление асинхронным электродвигателем с помощью регулятора частоты до недавнего времени было сложно. Причина – высокая стоимость производства и (соответственно) продажи преобразователей частоты.
Ситуация изменилась с появлением схем с IGBT-транзисторами (БТИЗ, биполярные транзисторы с изолированным затвором, производительные микропроцессорные системы). На их базе производителям из Японии, Европы и США удалось снизить стоимость изготовления частотного преобразователя, не теряя в его технических характеристиках.
Виды управления скоростями
Существует несколько видов управления асинхронным электродвигателем, среди которых самым распространенным в последние годы стал метод векторного или векторного бездатчивокового регулирования скорости. Он нередко встречается в частотном преобразователе, который изначально применяет скалярное управление без клемм для присоединения датчика скорости.
Собственно, вид регулирования асинхронного двигателя частотным преобразователем, зависит от класса последнего. А делят регуляторы частоты по нескольким признакам.
- По типу управления – на устройства ручного и автоматического регулирования.
- В зависимости от вида выходной нагрузки частотный преобразователь делится по способу исполнения:
- на устройства для электроприводов насосного и вентиляторного оборудования;
- механизмы для привода общепромышленного назначения;
- частотные преобразователи для электродвигателей, которые эксплуатируются в сложных условиях (с перегрузками).

Частотные преобразователи последних поколений, кроме разных по исполнению вариаций, могут иметь еще и разный набор функций. К последним относятся 2 вида управления (ручной и автоматический) скоростью вращения и его направлением, потенциометр на основной панели, система настройки диапазонов выходных частот (0–800 Гц).
Принцип
Задачи частотника в системе частотного регулирования асинхронного электродвигателя:
- изменение показателей электродвигателя в автоматическом режиме через обработку сигналов с датчиков, установленных на периферии;
- приведение привода в действие, согласно настройкам (программируемый алгоритм работы по времени);
- поддержание функции автоматического восстановления первоначальных настроек работы в случаях кратковременных остановок (прерываний питания);
- удаленное управление переходными процессами с пульта;
- защита электродвигателя от перегрузок.
Принцип частотного регулирования асинхронного двигателя выражен в формуле:

Его суть: изменяя частоту f1 питающего напряжения, можно менять угловую скорость магнитного поля статора при неизменном количестве пар полюсов, обозначенных в формуле p. Такой метод обеспечивает оптимальные характеристики работы асинхронного электродвигателя, но и оптимальные показатели регулирования частоты:
- мягкое (плавное) регулирование скоростей в большом диапазоне частоты;
- повышенная жесткость механических показателей;
- регулирование частоты вращений вала без повышения скольжения электродвигателя (за счет чего потери мощности сводятся к предельному минимуму).
Одним из условий частотного регулирования скорости асинхронного двигателя является одновременное с частотой вращений изменение напряжения, которое к нему подводится. Это нужно для повышения энергетических показателей работы электропривода (КПД, коэффициенты мощности, способности выдерживать перегрузки).
Закон частотного регулирования асинхронного двигателя (закон напряжения) определяется типом момента нагрузки (обозначается как Мс).
- Когда Мс = const, напряжение на статоре регулируется пропорционально частоте вращения, согласно выражению:



Другими словами, для реализации поставленных перед ним задач (плавное бесступенчатое частотное регулирование частоты оборотов вала асинхронного электродвигателя) частотный преобразователь должен одновременно:
- менять частоту оборотов;
- регулировать на статоре напряжение.
Технические характеристики для учета

Основные характеристики асинхронного двигателя при частотном регулировании, которые влияют на его работу, а потому должны учитываться в обязательном порядке:
- Диапазон изменения – Д. Представляет собой предел, до которого возможно регулирование. Вычисляется как соотношение минимальной и максимальной частоты вращения.
- Степень плавности частотного регулирования. Рассчитывается по минимальному скачку частоты вращения вала электродвигателя при переходе от одной механической характеристики к другой.
- Зона регулирования (направление изменения вращения). Номинальные условия эксплуатации задают естественный набор характеристик электродвигателя, которые при управлении частотой вращения начнут изменяться. На выходе асинхронный электродвигатель получит новые – искусственные – характеристики, которые, как правило, ниже, чем естественные.
Правила регулирования частоты

Максимум новой частоты зависит от ее механических свойств. На более высокой частоте вращения по отношению к номинальной асинхронные электродвигатели выдают лучшие энергетические показатели, чем на более низкой. Поэтому в системах с редуктором полезно осуществлять регулирование с изменением частоты и вниз, и (особенно) вверх вплоть до максимума, который зависит от механической прочности ротора.
При этом важно учитывать следующее правило. При повышении количества оборотов вала относительно паспортных данных электродвигателя частота его источника питания не должна увеличиваться более, чем в 1,5–2 раза от номинальной.
Такой метод управления – частотное регулирование асинхронного двигателя – более всего оправдывает себя в механизмах и короткозамкнутым ротором. В случае с ним ввиду отсутствия скольжения потери мощности остаются минимальными, а выходные механические характеристики – с высокой жесткостью.
Плюсы электродвигателя с регулированием скорости
Основной плюс электродвигателя, управляемого с помощью частотного преобразователя, – высокий опрокидывающий момент. Это он обеспечивает стабильную эксплуатацию электропривода и подключенного к нему оборудования в большом диапазоне частот вращения.
Благодаря данному факту применение асинхронных электродвигателей с регулированием скорости позволяет отказаться от ряда механизмов (снижается потеря мощности, к которой приводит их использование), получая высокий КПД.
Преобразователь частоты для асинхронного электродвигателя
Источник
Как работают преобразователи частоты для асинхронных двигателей
Асинхронные электродвигатели – самые распространенные электрические машины. Они отличаются простотой конструкции, дешевизной, высокой ремонтопригодностью, а также другими преимуществами. Они широко используются для привода промышленного оборудования, механизмов и устройств самого разного назначения. Сферу их применения несколько ограничивают высокие пусковые токи, затруднение регулирования скорости, ударные механические нагрузки на оборудование, соединенное с валом при пуске.
Частотные преобразователи позволяют осуществлять мягкий пуск электрических машин, ограничивать пусковые токи, синхронизировать момент силы на валу с моментом нагрузки, осуществлять точную регулировку скорости вращения, подключать трехфазные двигатели в однофазную сеть без конденсаторов.
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.

Принцип действия частотных преобразователей
Принцип действия частотного регулирования основан на зависимости скорости вращения и момента силы на валу двигателя переменного тока от частоты напряжения питания. Частотные регуляторы изменяют частоту поданного на электродвигатель напряжения, тем самым регулируя скорость вращения ротора и момент силы.
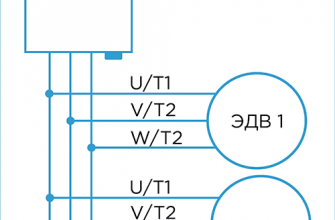
Преобразование частоты может осуществляться несколькими способами. Схема преобразования частоты с непосредственной электрической связью с сетью представляет собой управляемый выпрямитель на тиристорах. Управляющий блок генерирует сигналы, поочередно отпирающие полупроводниковые устройства, подающие напряжение заданной частоты на обмотки электрической машины.
Такая схема отличается высоким к.п.д., обеспечивает стабильную работу двигателя при небольших скоростях вращения ротора, передачу генерируемой электроэнергии при торможении двигателя в сеть.
Однако, такие недостатки, как невозможность изменять частоту в большую сторону, наличие в выходном напряжении постоянной составляющей и субгармоник, вызывающих перегрев обмоток и появление электромагнитных помех, ограничивают сферы применения частотников с непосредственной связью.
Большинство современных частотных преобразователей построено на базе схем двойного преобразования. Такое техническое решение имеет следующие преимущества:
- Возможность изменять частоту как в большую, так и меньшую сторону.
- Выходное напряжение чистой синусоидальной формы.
- Отсутствие высших гармоник.
- Плавное, высокоточное регулирование частоты питающего напряжения двигателя.
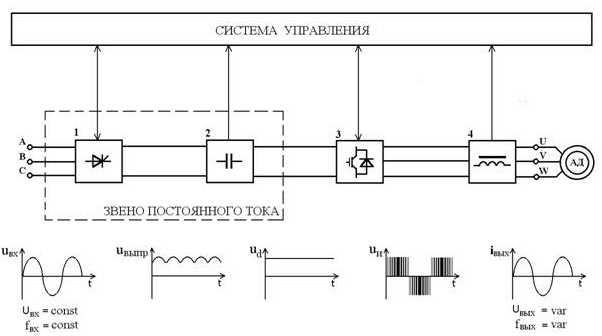
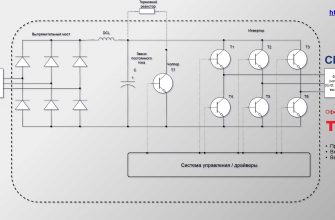
Состоит такой преобразователь частоты из трех блоков:
- Диодного или тиристорного выпрямителя с емкостными, индуктивными или комбинированными фильтрами. Этот узел осуществляет выпрямление сетевого напряжения и его сглаживание.
- Инвертирующего блока. Этот элемент осуществляет обратное преобразование постоянного напряжения в переменное. Индуктивный элемент на выходе осуществляет фильтрацию постоянной составляющей, а также высокочастотных помех, наличие которых негативно сказывается на работе электродвигателя.
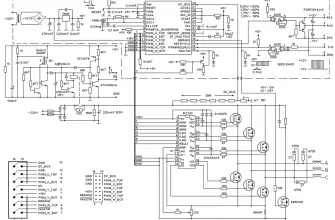
- Управляющей схемы на базе микропроцессора. Основные ее функции – задание частоты выходного напряжения и тока. Частота тока на выходе инвертора определяется шириной или длительностью управляющих импульсов со схемы управления (широтно- или частотно- импульсная модуляция). Процессор также осуществляет связь с удаленными пунктами управления, автоматическое регулирование по обратной связи по механическим и электрическим характеристикам подключенной к нему электрической машины, а также другие функции.
Таким образом, при частотном регулировании питающее напряжение сначала преобразуется в постоянное, затем инвертируется в переменное напряжение требуемой частоты.
Выбор частотного преобразователя
При проектировании частотно-регулируемого электропривода необходимо учесть множество нюансов. При выборе частотника руководствуются следующими критериями:
- Назначение преобразователя. Многие производители выпускают ПЧ, предназначенные для электродвигателей насосов, лифтов, электроприводов вентиляционных систем, а также универсальные устройства общепромышленного назначения. Специализированные частотники производят под конкретное технологическое оборудование. Возможность их адаптации существенно ограничена. Общепромышленные регуляторы частоты можно настраивать под различные приводы.
- Способ управления и поддержка различных протоколов связи. Регулируемые по частоте электроприводы обычно интегрируются в комплексные системы автоматизации и удаленного контроля и управления. Частотный преобразователь должен быть укомплектован контроллером, который поддерживает связь по протоколу, применяемому в конкретной АСУТП.
- Мощность и перезагрузочная способность. Номинальная электрическая мощность преобразователя должна быть больше аналогичного параметра электродвигателя на 15-30%. При расчете мощности учитывают пусковые токи электрической машины, пиковые нагрузки на двигатель и их длительность. Ошибки ведут к перегреву частотника, выходу из строя силовых транзисторов или тиристоров.
- Диапазон и точность регулирования. Интервал изменения частоты и точность ее задания должны соответствовать требованиям условий технологического процесса. Возможность изменения частоты у скалярных преобразователей 1:10, если требуется более широкий диапазон, необходим частотник с векторным управлением.
- Электромагнитная совместимость. Частотный преобразователь чувствителен к электромагнитным помехам и сам является их источником. Выбор устройства осуществляется на основании условий его установки. При необходимости может потребоваться его установка в отдельном помещении, подключение специальных фильтров и использование экранированных кабелей. Компания «Данфосс» выпускает преобразователи, укомплектованные встроенными ЭМ-фильтрами.
- Наличие функций отключения двигателя при перегреве, дисбалансе фаз, перегрузках, других аварийных и ненормальных режимов работы.
- Наличие автоматизированного управления по событиям. Для синхронизации работы промышленного оборудования необходимы частотники, имеющие функции регулирования по достижению определенной величины технологических параметров.
- Количество входов и выходов для подключения удаленных устройств управления и контроля. На случай модернизации САР или усложнения АСТП рекомендуется выбрать частотники с избыточным количеством аналоговых и дискретных разъемов. Для электроприводов автоматизированных систем рекомендуется подобрать частотный регулятор со встроенной памятью и функцией ведения журнала событий.
- Номинальный ток и напряжение. Электрические параметры частотника должны соответствовать характеристикам электродвигателя.

Выбор частотного регулятора для промышленного оборудования делается на основании расчетов по специализированным методикам. Малейшие ошибки могут привести к авариям, которые могут иметь непредсказуемые последствия. Проектирование электропривода и выбор ПЧ целесообразно доверить специалистам по автоматизации. Правильный выбор частотника обеспечивает экономию электроэнергии до 40-50%, снижение затрат на ремонт и обслуживание электропривода и дает неплохой экономический эффект.
Источник