Дифманометр сильфонный пневматический типа ДС-П
ДС-П предназначен для измерения перепада давления и преобразования его в пневматический сигнал от 0,2 до 1 кгс/см 2 с выходом по линии связи на вторичный прибор.
Принцип действия основан на пневматической силовой компенсации. ДC — П состоит из измерительного блока и пневматического силового преобразователя.
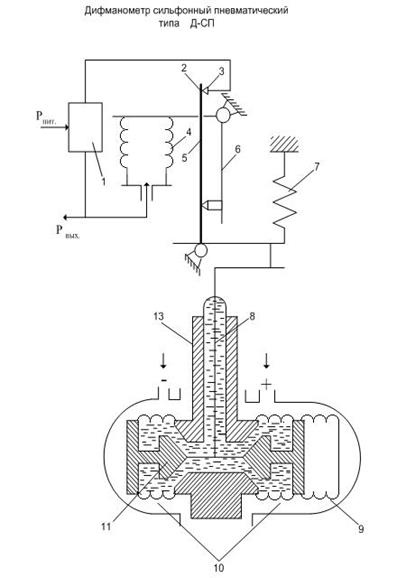
Рис. 3.5 Дифманометр сильфонный пневматический ДС — П
9 – компенсационный сильфон;
Измерительный блок имеет плюсовую + и минусовую — камеры, разделенные основанием. В камерах расположены чувствительные элементы – сильфоны 12. Сильфоны с одной стороны жестко связаны с основанием, а с другой – с клапанами 11.
Внутренняя полость сильфонов 1 заполнена кремнийорганической жидкостью. Изменение объема жидкости, вызванное колебаниями температуры, воспринимается компенсационным сильфоном 9. Клапаны 11 предохраняют сильфоны при односторонней нагрузке измерительного блока и при нарушении герметичности системы.
Измерительный перепад давления воспринимается сильфонами 12 и преобразуется в усилие, которое через рычажную систему 5, 6, 8 уравновешивается усилием, развиваемым давлением воздуха в СОС-4.
При изменении DР происходит незначительное перемещение рычажной системы и связанной с ней заслонки 2 относительно сопла 3. Сигнал рассогласования через пневматический усилитель 1 поступает в СОС-4 и одновременно на вторичный прибор. Величина этого сигнала пропорциональна измеряемому перепаду давления.
Настройка прибора на заданный диапазон измерения осуществляется перемещением подвижной опоры вдоль рычага 6.
Для установки начального значения выходного сигнала служит корректор нуля 7.
ДС-П отличаются пределами измерения и размерами измерительных сильфонов.
ДС-П1: 25; 40; 63; 100; 160; 400 кгс/м 2 ;
ДC-П2: 40; 63; 100; 160; 250; 400 кгс/см 2 ;
ДC-П3: 400; 630; 1000; 1600; 2500 кгс/м 2 ;
ДC-П4: 0,4; 0,63; 1,0; 1,6; кгс/см 2 ;
ДC-П5: 2,5; 4,0; 6,3 кгс/см 2
Комплекс пневматических измерительных преобразователей
(II поколение)
13 ДА – преобразователь для измерения абсолютного давления газа;
13 ДИ – для измерения избыточного давления;
13 ДИВ – для измерения избыточного давления и вакуума;
13 ДД – преобразователь перепада давления;
13 ТД – преобразователь температуры газа, пара или жидкости.
Все эти приборы имеют одинаковые пневмопреобразователи, но разные измерительные блоки в зависимости от измеряемого параметра.
Измерительный преобразователь перепада давления типа 13ДД11
13ДД11 предназначен для измерения перепада давления и преобразования его в пневмосигнал от 0,2 до 1 кгс/см 2 с выходом по линии связи на вторичный прибор.
Принцип действия основан на пневматической силовой компенсации.

Рис. 3.6 Дифманометр мембранный 13ДД11
12- сильфон обратной связи (СОС);
13ДД11 построен по блочному принципу. Он состоит из 2-х мембранного измерительного блока и однорычажного пневмосилового преобразователя. Измерительный блок состоит из чувствительного элемента и закрывающих его фланцев, стянутых болтами и образующих с ним две камеры: (+) и (-) для подвода перепада давления.
Мембранный блок заполняют полиэтилсилоксановой жидкостью.
Воздух питания давлением 1,4 кгс/см 2 через фильтр и редуктор поступает в усилитель мощности и через сопло выходит в атмосферу.
Под воздействием перепада давления на чувствительном элементе измерительного блока возникает усилие, которое действует на рычаг вывода. Он поворачивается на небольшой угол и перемещает заслонку относительно сопла. В случае приближения заслонки к соплу давление в камере управления 5 усилителя возрастает, и металлические мембраны 6 и 7 закрывают клапан 8 и открывают клапан 9. В результате давление в камерах 10 и 11 увеличивается. Это давление является выходным сигналом. Одновременно оно поступает на сильфон обратной связи, усилие на котором компенсирует усилие от изменения перепада давления.
1) корректор нуля (для установки начального значения выходного сигнала, равного 0,2 кгс/см 2 );
2) СОС – настройка на заданный предел измерения осуществляется перемещением СОС вдоль рычага.
Перенастройка прибора с одного предела на другой (тарировка) осуществляется путем замены СОС (Æ 28, 34, 42 мм).
Малые перепады: Большие перепады:
0 ¸ 630 кгс/м 2 ; 0 ¸ 0,4 кгс/см 2 ;
0 ¸ 1000 кгс/м 2 ; 0 ¸ 0,63 кгс/см 2 ;
0 ¸ 1600 кгс/м 2 ; 0 ¸ 1,0 кгс/см 2 ;
0 ¸ 2500 кгс/м 2 ; 0 ¸ 1,6 кгс/см 2 .
Дифманометры 13ДД11 отличаются диаметрами сильфонов обратной связи и диаметрами мембран измерительного блока.
Источник
Большая Энциклопедия Нефти и Газа
Пневмосиловой преобразователь
Пневмосиловой преобразователь с помощью настроенного груза, подвижной опоры и винта корректора нуля позволяет настраивать плотномер на диапазоны измерения плотности 100, 150 и 200 кг / м3 в заданных пределах измерения. [1]
Пневмосиловой преобразователь используется во всех датчиках пневматической ветви. [3]
Пневмосиловые преобразователи и первичные приборы, созданные на их базе, разработаны НИИТеплоприбором совместно с московским заводом Манометр. Пневмосиловые преобразователи, конструктивно сочленяемые с измерительным блоком прибора, выпускаются с линейной характеристикой. [4]
Пневмосиловой преобразователь используется во всех датчиках пневматической ветви. [6]
Пневмосиловой преобразователь состоит из передаточного механизма, индикатора рассогласования, пневмоусилителя и узла обратной связи. [8]
Пневмосиловой преобразователь состоит из передаточного механизма, индикатора рассогласования, пнев-мореле ( пневмоусилителя) и блока обратной связи. [10]
Пневмосиловой преобразователь вакуумметра состоит из передаточного рычажного механизма, индикатора рассогласования, усилителя и узла обратной связи. [12]
Пневмосиловой преобразователь ГСП ( рис. 51) предназначен для преобразования усилия, развиваемого измерительным блоком датчика, в пневматический унифицированный сигнал. [13]
Унифицированный пневмосиловой преобразователь имеет аналогичную структуру. [15]
Источник
Большая Энциклопедия Нефти и Газа
Пневмосиловой преобразователь
Наладка пневмосиловых преобразователей принципиально не отличается от наладки электросиловых преобразователей. [16]
В пневмосиловом преобразователе ( рис. 59, б) усилие, развиваемое чувствительным элементом, поворачивает основной рычаг вокруг оси против часовой стрелки. При этом заслонка 4 приближается к соплу 5, из которого свободно истекает сжатый воздух. Сопло 5 питается от усилителя 10 через капиллярное отверстие, поэтому приближение или удаление заслонки от сопла на несколько микрон вызывает резкое изменение давления в линии сопла. Комплект, состоящий из сопла и заслонки, называют реле сопло-заслонка. Изменение сигнала на выходе реле воспринимает усилитель 10, который изменяет давление в компенсирующем сильфоне 9 так, что усилие, развиваемое сильфоном и передаваемое на рычаг 12 и на основной рычаг, уравновешивается усилием, развиваемым чувствительным элементом. [17]
В пневмосиловом преобразователе ( рис. 94) усилие, развиваемое чувствительным элементом, поворачивает основной рычаг вокруг оси против часовой стрелки. [19]
В пневмосиловом преобразователе ( рис. 26) усилие, развиваемое чувствительным элементом, поворачивает основной рычаг вокруг оси против часовой стрелки. При этом заслонка 3 приближается к соплу 2, из которого свободно истекает сжатый воздух. Сопло 2 питается от усилителя 5 через капиллярное отверстие, поэтому приближение или удаление заслонки от сопла на несколько микрон вызывает резкое изменение давления в линии сопла. [21]
Уровнемер состоит из пневмосилового преобразователя и измерительного блока. [23]
В основу построения пневмосиловых преобразователей положен принцип силовой компенсации. В конструкции пневмосиловых преобразователей используются основные узлы рычажной системы механизма рассмотренного выше электросилового преобразователя. [25]
Описание конструкции и работы пневмосилового преобразователя дано выше. [27]
Первичные приборы с унифицированным пневмосиловым преобразователем могут работать с любыми пневматическими вторичными приборами, регулирующими блоками и другими устройствами пневмоавтоматики. [29]
Для устранения автоколебаний в пневмосиловом преобразователе предусмотрен жидкостной демпфер, который состоит из стаканчика 17 с конической внутренней поверхностью и поршня 16, связанного с Г — образным рычагом передаточного механизма. Коническая поверхность стакана позволяет регулировать величину образуемого между ними зазора и тем самым подбирать требуемый коэффициент демпфирования прибора. [30]
Источник
Электро- и пневмосиловые преобразователи
Для преобразования измерительной информации в унифициро-
ванный сигнал в ГСП применяются преобразователи, работающие по
принципу силовой компенсации.
Электросиловой преобразователь ГСП (рис. 9.1) преобразует уси-
лие, развиваемое измерительным устройством ИУ, в электрический
сигнал (ток). В основу преобразования «сила—ток» положен принцип
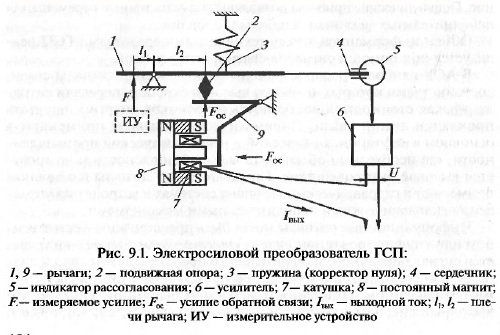
силовой компенсации. Измеряемое усилие F преобразуется в пере-
мещение подвижного сердечника 4 индикатора рассогласования 5,
представляющего собой дифференциально-трансформаторный пре-
образователь, на первичную обмотку которого подается питание, а две
вторичные обмотки подключены к входу усилителя 6. Это усилие F
через подвижную опору 2 уравновешивается усилием обратной связи
Foc, развиваемым магнитоэлектрическим преобразователем, состоя-
щим из стержневого постоянного магнита 8 с П-образным магнито-
проводом, в зазоре которого расположена катушка 7, жестко закреп-
ленная на рычаге 9. Обмотка рамки соединена с выходом электрон-
ного усилителя 6. При изменении значения F равновесие рычажной
системы нарушается, что приводит к перемещению рычага 1 и укреп-
ленного на нем сердечника 4 из магнитомягкого материала. Переме-
щение сердечника 4 преобразуется индикатором перемещения 5 в
электрический сигнал, поступающий на вход электронного усилите-
ля 6, который его усиливает и преобразует в ток /ВЬ1Х, подаваемый в
линию связи и на вход магнитоэлектрического элемента обратной
связи. При протекании тока /вых по катушке 7 элемента обратной свя-
зи формируется усилие обратной связи Foc

где В — магнитная индукция; I — средняя длина витка катушки;
n — число витков катушки. Перемещение рычага 1 под действием
усилий F и Foc происходит до тех пор, пока не наступит состояние

где l1 и 1г — плечи рычагов соответственно от точки действия силы F
до неподвижной опоры и от точки действия силы Foc (подвижная
опора 2) до неподвижной опоры.
В состоянии равновесия выходной сигнал преобразователя
«сила—ток» связан с измеряемым усилием F зависимостью

Таким образом, постоянный ток /вых пропорционален усилию F,
а следовательно, и значению измеряемой физической величины. На-
стройка преобразователя на заданный предел измерения осуществля-
ется перемещением подвижной опоры 2. Начальное значение вы-
ходного сигнала преобразователя устанавливается натяжением пру-
Пневмосиловой преобразователь ГСП (рис. 9.2) преобразует уси-
лие, развиваемое измерительным устройством ИУ, в пневматический
сигнал. Измеряемая физическая величина (давление, температура,
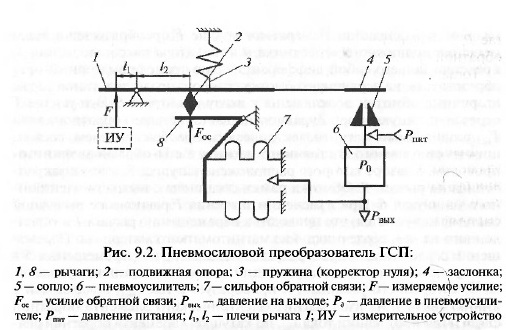
расход и др.) преобразуется в измерительном устройстве ИУ в про-
порциональное усилие F, которое воздействует на рычаг 1 и связан-
ную с ним заслонку 4. Если заслонка прикрывает неподвижное
сопло 5, что соответствует увеличению силы F, то давление Р0 в
пневмоусилителе 6 увеличивается (при полностью закрытой заслон-
ке давление Р0 равно давлению питания Рпит). Воздух под этим дав-
лением поступает в сильфон обратной связи 7 и является выходным
сигналом Рвык преобразователя. Усилие обратной связи Foc через ры-
чаг 8 передается рычагу 1 и уравновешивает усилие F, воспринимае-
мое рычагом 1 от измерительного устройства ИУ. Таким образом,
положение заслонки 4 относительно сопла 5 и давление Рвых в про-
цессе измерения в каждый момент соответствует значению измеряе-
мой физической величины. При минимальном усилии F заслонка
полностью открывает сопло, полость пневмоусилителя сообщается с
атмосферой и давление Р<) становится равным барометрическому
Пределы измерения входного усилия F настраиваются перемеще-
нием подвижной опоры 2. Начальное значение выходного сигнала
Р,шх устанавливается натяжением пружины 3 (корректора нуля).
Для состояния равновесия рычага 1 можно записать

где F, Foc — усилия, развиваемые измерительным устройством ИУ и
сильфоном обратной связи /соответственно; l1, l2 — плечи этих уси-
лий. Усилие Fnc может быть выражено как

где Рвых — давление выхода; Sэф— эффективная площадь сильфона
Тогда давление выхода может быть представлено как

Диапазон изменения унифицированного пневматического сигна-
ла составляет 0,02 . 0,1 МПа, поэтому при F= 0 с помощью натяже-
ния пружины 3 (корректора нуля) производится настройка нулевого
сигнала преобразователя. С учетом этой настройки окончательное
выражение для статической характеристики имеет вид

В пневмосиловом преобразователе можно изменять диапазон пре-
образования в пределах ± (10—20) % за счет изменения соотношения
l1 / l2 в результате перемещения точки опоры 2.

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).



Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.
Источник