Энергетические показатели электропривода на базе частотного преобразователя
На долю электропривода приходится около 70 % всей вырабатываемой электроэнергии. Поэтому эффективность использования этой электроэнергии имеет огромное техническое и экономическое значение. Питание на электрические приводы (за исключением приводов транспортных или мобильных машин) поступает от промышленной сети переменного тока частотой 50 Гц. Электроприводы потребляют (а при работе в рекуперативном тормозном режиме и отдают) из сети активную мощность. Активная мощность расходуется на полезную работу и покрытие потерь во всей электромеханической системе рабочей машины. Анализируя эффективность использования электрической энергии, следует различать энергетическую эффективность самого технологического процесса, который осуществляется рабочей машиной с электроприводом, и эффективность собственно электропривода, характеризуемую его КПД, который представляет собой отношение выходной мощности Рвых данного устройства к входной мощности Р вх, или отношение полезной мощности Рпол (или энергии) к затраченной Р затр:
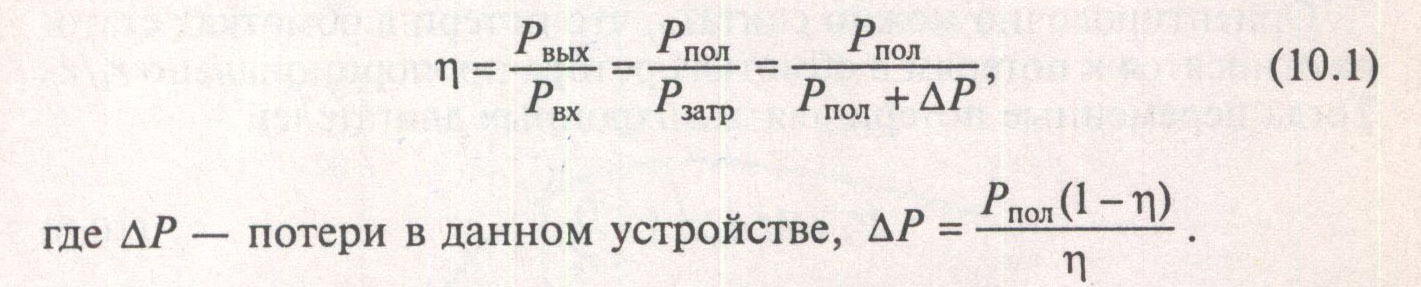
Поскольку силовая часть электропривода состоит из электродвигательного, передаточного и преобразовательного устройств, то КПД электропривода

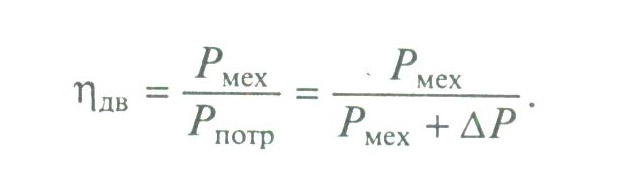
КПД электродвигателя — это отношение механической мощности на валу двигателя Рмех к потребляемой мощности Рпотр со стороны обмоток статора (для машин постоянного тока — со стороны якоря):
У асинхронных двигателей мощностью выше 0,1 кВт номинальный КПД составляет 0,85. 0,9. Сростом мощности номинальный КПД повышается и у крупных высокоскоростных двигателей переменного тока мощностью свыше 1000 кВт может достигать 0,97. КПД электродвигателей существенно зависит от нагрузки на валу двигателя. Для анализа этой зависимости пользуются методом разделения потерь АР на постоянные К и переменные V:

Для нерегулируемых по скорости двигателей постоянные потери включают в себя:
• потери в стали;
• механические потери, в том числе на самовентиляцию;
• добавочные потери.
Переменные потери V вычисляют по следующим формулам:
Ориентировочно можно считать, что потери в обмотках статора относятся к потерям в обмотках ротора пропорционально r1/r2. Тогда переменные потери для асинхронных двигателей

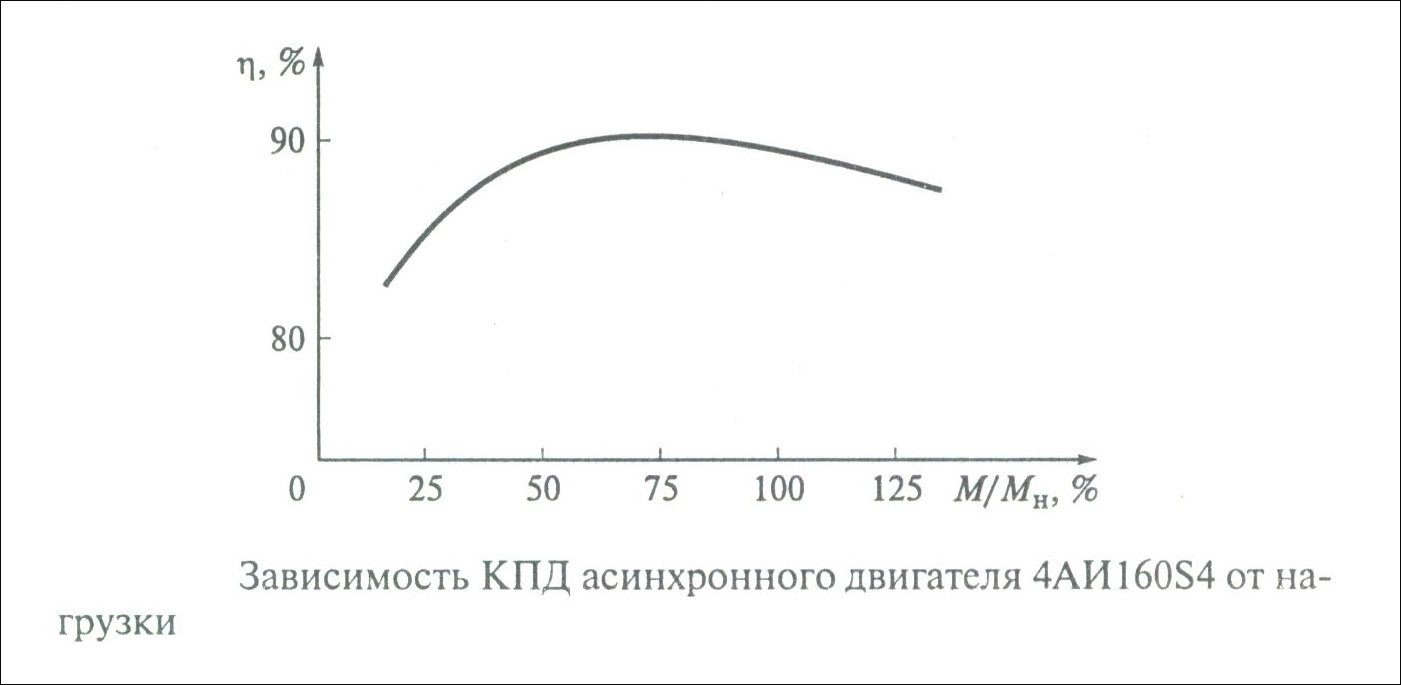
Очевидно, что при работе с неполной нагрузкой КПД двигателя снижается. Типичная кривая зависимости КПД асинхронного двигателя от нагрузки показана на рис. 10.1. Из рис. 10.1 видно, что завышение установленной мощности двигателя ведет к снижению его эксплуатационного КПД, т.е. к непроизводительному расходу электроэнергии. КПД преобразовательного устройства, выполненного на базе силовых полупроводниковых приборов, довольно велико. Потери в преобразователе определяются главным образом прямым падением напряжения в полупроводниковом приборе. В среднем можно считать, что U=2 В, для мостовых схем U=4,0 В. Таким образом
номинальные потери для преобразователей напряжением 440 В составляют 1%, а для преобразователей напряжением 220 В — 2 %. С учетом потерь в реактивных элементах полупроводниковых преобразователей можно принимать их КПД равным 0,95. 0,98. Потери в механических передаточных устройствах (редукторе, трансмиссии и др.) определяются главным образом силами трения. Эти потери, а следовательно, КПД механической передачи зависят от типа используемых подшипников, класса обработки зубчатых колес, систем смазки и др. КПД механической передачи существенно зависит от передаваемого момента. Под КПД рабочей машины (РМ) понимают произведение КПД электропривода nэп на КПД рабочей машины. Так, для вентиляторной установки
Если рабочая машина работает в энергетически постоянном режиме, то ее энергоемкость, выражаемая через КПД, определяется по формуле (10.4). Если рабочая машина работает циклически (например, грузоподъемные механизмы, продольно-строгальные станки и др.), то более правильно КПД рабочей машины определять по затратам энергии за цикл работы:
соответственно полезная работа за цикл, затраченная энергия за цикл.
В сети переменного тока, из которой поступает питание на электропривод, циркулирует реактивная мощность, вследствие чего происходит загрузка сети питания реактивным током, не создающим работы. Реактивная мощность оценивается величиной cosф, где угол ф — фаза сдвига первой гармоники тока относительно первой гармоники напряжения. У асинхронных короткозамкнутых двигателей номинальный coscp = 0,7. 0,8. Недогрузка асинхронного двигателя ведет к дальнейшему снижению cosф. В приводах по системе ТП—Д cosф = cos а, что определяется запаздыванием, устанавливаемым системой импульсно-фазового управления, открывания тиристоров. Поэтому в приводах ТП —Д при высокой скорости cosф в сети питания переменного тока будет высоким (0,8. 0,9), по мере снижения скорости, когда угол а растет, cos ф будет уменьшаться. При включении привода ТП —Д происходят «броски» реактивной мощности. В современных системах регулируемого электропривода стремятся использовать неуправляемые выпрямители, осуществляя регулирование величины напряжения, подаваемого к обмоткам двигателя, широтно-импульсными методами. В этом случае cos ф в сети питания будет не ниже 0,95. С точки зрения компенсации реактивной мощности многих потребителей электроэнергии эффективно использование для нерегулируемых электроприводов синхронных двигателей большой мощности, которые при перевозб. способны генерировать реактивную мощность для ее компенсации в энергосистеме предприятия.
Источник
Cos f частотного преобразователя
Какие преимущества использования технологии 87 Гц?
Так называемая технология 87 Гц подразумевает управление трехфазным стандартным асинхронным электродвигателем 230 V (треугольник) / 400 V (звезда), 50 Гц с подключением обмоток треугольником и управлением от преобразователя частоты питанием 380В. Параметры настройки максимальной частоты (С0011) и рабочей точки характеристики управления v/f (С0015) преобразователя должны быть установлены в значение 87Гц.
- Диапазон регулирования электродвигателя увеличивается в √3 (т. е. с 1:50 до 1:87)
- Эффективность использования электродвигателя увеличивается, так как увеличивается его номинальная скорость. Скольжение при этом не изменяется.
- Мотор выдает большую мощность (P = M * ω), следовательно в конечном итоге может быть выбран меньший, более дешевый электродвигатель для приводного решения.
- результирующая скорость существующей машины может быть увеличена без модификации редуктора и/или двигателя.
Заметки к использованию 2-х полюсных моторов:
- Учитывайте увеличение скорости (примерно 5000 об/мин) для 2-х полюсных моторов.
- Из-за низкой индуктивности таких моторов следует уменьшить добавку напряжения на низких оборотах Umin (C0016).
Почему, при использовании сетевых дросселей, номинальный входной ток преобразователя частоты меньше, чем номинальный выходной?
Номинальный ток преобразователя частоты с трехфазным питанием через сетевой дроссель является током активной нагрузки (cos φ ≈ 1) Статический выходной ток преобразователя — это мнимый полный ток электродвигателя, который состоит из активной (момент) и реактивной (потокосцепление) составляющих. Следовательно номинальный ток преобразователя частоты с сетевым дросселем меньше, чем выходной номинальный ток.
Как может производиться мониторинг температуры при управлении одним преобразователем частоты несколькими электродвигателями?
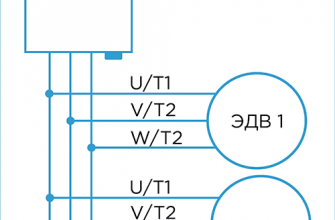
Преобразователи частоты Lenze имеют один вход для термодатчика электродвигателя. Существует два способа для контроля температуры, например 2-х моторов:
- Последовательное соединение термодатчиков (термоконтакт или РТС) к клеммам Т1 и Т2.
- Подключение термодатчиков первого электродвигателя к клеммам Т1 и Т2. Подключение термодатчиков второго мотора к кламмам 20 (+24 VDC) и, например, дискретному входу Е1 и назначить дискретному входу Е1 функцию TRIP-SET.
В первом случае, при срабатывании термозащиты, сообщение об ошибке не даст нам информации о том, какой именно электродвигатель отключен по перегреву.
Во втором случае эта информация может быть получена из сообщения об ошибке (например: OH3 ошибка для электродвигателя 1 или EEr ошибка для электродвигателя 2)
Примечание:
В некоторых преобразователях Вы можете использовать два паралельных входа для подключения термодатчиков (например: Servo Drives 9400 HighLine с версией прошивки 7.0 и выше)
Какое значение имеет cos φ для преобразователя частоты? Имеет ли смысл использование утановок компенсации реактивной мощности с преобразователями частоты?
Коэффициент мощности для преобразователя частоты примерно равен 0,98 (≈ 1).
Коэффициент мощности асинхронного электродвигателя, подключенного на выход преобразователя часототы имеет индуктивный характер. Однако, это значение не оказывает влияния на коэффициент мощности для преобразователя частоты.
В связи с этим приводная система, состоящая из преобразователя частоты и электродвигателя, не требует применения установок компенсации реактивной мощности.
Примечание:
Из-за нелинейности компонентов (выпрямителей) на входе преобразователя существует так называемая реактивная мощность, которая влияет на коэффициент мощности. Корректировка коэффициента мощности для компенсации влияния потребления нелинейного тока может быть осуществлена только специальными фильтрами гармоник. Такие фильтры обычно используются только в системах с высокими требованиями к гармоническим составляющим.
Какой принцип работы РТС датчика? Какие моменты необходимо учесть при их последовательном соединении?
 PTC датчики (PTC = positive temperature coefficient) — это компоненты, у которых внутреннее сопротивление возрастает с ростом температуры. Особенностью является нелинейность зависимости сопротивление / температура (см. диаграмму). После достижения температурного предела (Тпр) характеристика имеет резко возрастающий наклон. Если температура незначительно поднимается всего на несколько градусов — внутреннее сопротивление при этом резко возрастает от нескольких Ом до значения более 1кОм. Температурный предел Тпр может изменяться в зависимости от исполнения.
PTC датчики (PTC = positive temperature coefficient) — это компоненты, у которых внутреннее сопротивление возрастает с ростом температуры. Особенностью является нелинейность зависимости сопротивление / температура (см. диаграмму). После достижения температурного предела (Тпр) характеристика имеет резко возрастающий наклон. Если температура незначительно поднимается всего на несколько градусов — внутреннее сопротивление при этом резко возрастает от нескольких Ом до значения более 1кОм. Температурный предел Тпр может изменяться в зависимости от исполнения.
Свойства PTC элементов, необходимых для термодатчиков, определены в DIN44081/44082.
Соединение нескольких PTC последовательно:
Зависимость сопротивления РТС от температуры позволяет соединять два РТС датчика последовательно. Однако необходимо учитывать удвоение сопротивления при выборе соответствующей электроники.
Как снизить ток протекающий через подшипники в электродвигателе при работе с преобразователем частоты?
Подключение и заземление в соответствии с требованиями Инструкции — важная мера для уменьшения токов в подшипниках. Заземление должно иметь не только низкое сопротивление для обеспечения защиты обслуживающего персонала, но также иметь низкое высокочастотное сопротивление насколько это возможно.
Обычно, затухание тока может быть достигнуто снижением несущей частоты. Следовательно, несущая частота (С0018) должна быть установлена в минимальное значение. Однако, низкая несущая частота становится источником шума в приводе.
Так как основная проблема подшипниковых токов наблюдается при мощности более 15 кВт, Lenze предлагает специальные дроссели для уменьшения подшипниковых токов в этом диапазоне мощностей. Они позволяют уменьшить подшипниковые токи в 5 — 10 раз, так что достаточный срок службы электродвигателя будет гарантирован.
Нет ограничений для работы преобразователей частоты и сервопреобразователей с такими дросселями. Можно принебречь их влиянием на управление током электродвигателя в сервопреобразователе.
Дополнительные преимущества могут быть получены при использовании симметричных кабелей двигателя. Это может быть любой 3-проводный кабель с заземленным экраном или 6-проводный кабель с тремя симетричными заземляемыми проводниками меньшего сечения.
Для экономии средств Lenze рекомендует применять электродвигатели с изолированными подшипниками для электродвигателей мощностью 90кВт и выше. Текие подшипники имеют такие же размеры и допуски как и стандартные. Однако, применяя изолированные подшипники, приспособления на валу (приводная и неприводная стороны) должны также иметь изоляцию, иначе, например подшипники на присоединенном редукторе могут поглощать такие токи, что негативно скажется на долговечности работы.
Обратите внимание на следующее:
- Необходимо использовать экранированные кабели двигателя
- Экран кабеля двигателя должен быть заземлен с обеих сторон
- Экран должен контактировать по всей окружности кабеля (соединение хомутами).
- Экран соединяется с двигателем с специальным ЕМС кабелем через клеммную коробку.
Как посчитать падение напряжения на сетевом дросселе перед преобразователем частоты?
Падение напряжения и, следовательно, уменьшение напряжения на зажимах электродвигателя подключенного к преобразователю частоты может быть рассчитано следующим образом:
Индуктивное реактивное сопротивление (XL) сетевого дросселя зависит от индуктивности сетевого дросселя (L) и частоты напряжения питания (fmains):
X L = ω · L = 2 · π · f mains · L
Падение напряжения (U k) на сетевом дросселе рассчитывается исходя из номинального тока преобразователя частоты с сетевым дросселем I ном и индуктивного реактивного сопротивления сетевого дросселя (X L):
Для 1-фазных сетевых дросселей: U k = I ном · X L
Для 3-фазных сетевых дросселей: U k = I ном · X L · √3
Рассчитаем падение напряжения (U k) на сетевом дросселе ELN3-0022H130 (0.22мГн / 130A) для преобразователя частоты 8200 Vector 75 кВт (Напряжение питания 400В / 50Гц / 135А):
X L = ω · L = 2 · π · f · L = 2 · 50Гц · 0.22мГн = 0.069 Ом
U k = I ном · X L · √3 = 135А · 0.069Ом √3 = 16.1В
Падение напряжения = U k / U сети = 16.1В / 400В ≈ 4%
Для чего необходим сетевой дроссель?
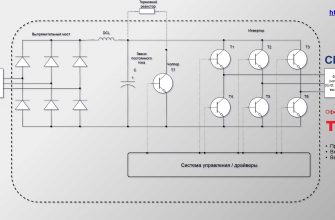
Неуправляемый входной выпрямитель преобразователя частоты выпрямляет переменное напряжение сети в постоянное звена постоянного тока. В последнем для хранения энергии присутствуют электролитические конденсаторы. Через входной выпрямитель в шину постоянного тока передаются и пиковые значения напряжения сети, а форма питающего тока зависит от формы питающего напряжения. Из-за низкого внутреннего сопротивления наблюдаются пики напряжения в питающей сети. Они наводят помехи в сеть.
Сетевой дроссель в питающей сети преобразователя частоты увеличивает время нарастания тока. Это обусловлено его внутренним индуктивным сопротивлением. Благодаря ему уменьшаются пульсации тока в сети. Следовательно уменьшается реакция (увеличивается инерционность) системы электропитания.
Положительная сторона использования сетевых дросселей: Уменьшение пиков тока значительно увеличивает срок службы электролитических конденсаторов звена постоянного тока.
Сборник формул и определений приводной техники
Источник