- Как запустить и настроить частотный преобразователь — инструкция для чайников
- Подключение силовых цепей
- Подключение цепей управления
- Настройка
- А теперь к параметрированию
- Далее переведём управление на внешние кнопки и настроим его
- Защита и безопасность
- Вместо заключения
- Настройка частотного преобразователя для регулирования давления в трубопроводе
- Структура
- ПИД-регулятор
- Датчик
- Подключение
- Настройка
- Заключение
Как запустить и настроить частотный преобразователь — инструкция для чайников
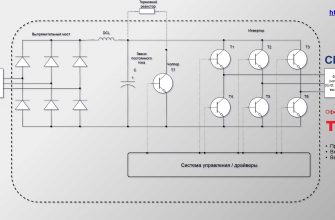
Его называют инвертор, частотный регулятор или просто «частотник». Зачем же нужен этот черный ящик и как его настроить? Попробуем разобраться на примере Inovance MD310.

Преобразователь частоты — это силовой электронный блок, который является посредником между системой управления и электродвигателем. Он обеспечивает питание для двигателя, защищает его и задаёт необходимый режим работы — разгон, торможение или постоянное изменение скорости.
Для примера возьмем шлифовальный станок, который часто можно встретить в промышленном цеху или в столярной мастерской. Для качественной работы станка движение должно осуществляться в двух направлениях, скорость вращения ленты — меняться плавно, а аварийная кнопка мгновенно отключать питание. Без преобразователя частоты тут точно не обойтись.

Рис.1 Внешний вид шлифовального станка.
Подключение силовых цепей
Все провода, подключаемые к частотному преобразователю, можно разделить на 2 группы: силовые и контрольные. Рассмотрим подключение силовых.
Три провода сетевого питания 380 В, 50 Гц — клеммы R, S, T + провод заземления PE. Нейтраль частотному преобразователю не нужна. Даже если она у вас есть, подключать не нужно. А вот провода питания можно подключать в любом порядке. При необходимости чередование фаз можно изменить в программе частотника.
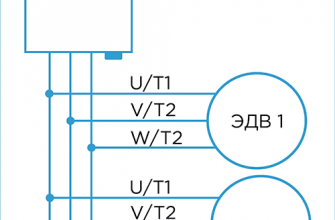
Три провода питания двигателя — клеммы U, V, W + провод заземления PE. На выходе напряжение может меняться от 0 до 380 В, а частота от 0 до 500 Гц. В этом и кроется смысл работы частотного преобразователя — он позволяет изменять скорость двигателя от нуля до номинального значения и даже выше, если это позволяет механика.

Рис.2 Подключение силовых цепей
Подключение цепей управления
С контрольными проводами всё несколько сложнее. Тут нужно хорошо подумать, прежде чем подключать. На выбор целая россыпь дискретных и аналоговых входов и выходов. В документации производители чаще всего публикуют стандартную схему подключения с заводскими настройками, но для каждого механизма на деле нужна своя схема и индивидуальные настройки.

Рис.3 Подключение цепей управления
У нас задача не самая сложная. Для управления шлифовальной машиной достаточно кнопок «Пуск», «Стоп», переключателя «Вперед – Назад» и переменного резистора для изменения скорости вращения, его ещё называют потенциометром.
К дискретным входам DI подключаются сигналы, которые могут принимать одно из двух состояний — «вкл» и «выкл» или логический 0 и 1. В нашей схеме это кнопки «Пуск», «Стоп», переключатель направления и аварийный «грибок». Мы будем использовать кнопки без фиксации, которые уже установлены на станке.
К аналоговым входам AI подключаются сигналы с непрерывно меняющейся величиной тока 4. 20 мА или напряжения 0. 10 В. Это могут быть датчики, сигналы от контроллера или другого внешнего устройства. В нашем случае — это ручка потенциометра, которая обеспечивает плавную регулировку скорости.
Потенциометр или переменный резистор — это регулируемый делитель напряжения с тремя контактами.
 » >
» >
Рис.4 Внешний вид потенциометра
На два крайних неподвижных контакта подаётся постоянное напряжение 10 В от частотного преобразователя, а средний подвижный контакт служит для снятия текущей величины напряжения, которая зависит от положения ручки. Если ручка повернута наполовину, значит и напряжение будет только половинное = 5 В. Преобразователь пересчитает напряжение в задание скорости и разгонит двигатель.

Рис.5 Подключение потенциометра
Любой потенциометр не подойдёт, необходим с сопротивлением от 2 до 5 кОм, чтобы аналоговый вход стабильно работал. А ещё он должен быть с удобной ручкой, ведь крутить его придётся постоянно. Мощность может быть любой, даже 0,125 Вт достаточно. Идеально подойдёт XB5AD912R4K7 с сопротивлением 4,7 кОм.
На дискретные — DO и аналоговые выходы AO преобразователь выдает информацию о своем текущем состоянии, скорости или токе двигателя, достижении заданных значений или выходе за их пределы. В нашем случае выходы не используются, поэтому подключать нечего.
Настройка
Недостаточно просто подключить все провода к частотнику, его ещё нужно правильно настроить, чтобы механизм работал стабильно и долго. Для этого в частотном преобразователе несколько сотен параметров. Конечно, все настраивать не придётся, но вот основные — обязательно.
Настройка осуществляется с помощью клавиш на встроенной панели управления. С ними всё предельно просто.
Кнопка PRG отвечает за вход и выход из режима программирования. Кнопки вверх, вниз и вбок осуществляют навигацию внутри меню, а кнопка Enter — подтверждает выбор параметра или его значения.
MF.K — это дополнительная функциональная кнопка, которую можно настроить на необходимое действие, например переключение между местным и дистанционным управлением или смену направления вращения.
Зеленая и красная кнопки — это Пуск и Стоп, если управление осуществляется с панели.
Если запутались, не беда. Нужно несколько раз нажать на кнопку PRG, чтобы вернуться к исходному состоянию.
 » >
» >
Рис.6 Внешний вид панели управления
А теперь к параметрированию
Во-первых, необходимо дать понять частотному преобразователю, какой двигатель к нему подключен. Для этого в параметры с F1-01 по F1-05 запишем значения с шильдика двигателя:
F1-01 = 1,5 кВт — номинальная мощность двигателя
F1-02 = 380 В — номинальное напряжение двигателя
F1-03 = 3,75 А — номинальный ток двигателя
F1-04 = 50 Гц — номинальная частота двигателя
F1-05 = 1400 об/мин — номинальная скорость двигателя

Рис.7 Шильдик двигателя
Теперь, когда основные данные о двигателе есть, нужно провести автонастройку. Этот процесс нужен, чтобы частотный преобразователь ещё лучше адаптировался к работе с конкретным двигателем: вычислил сопротивление и индуктивность обмоток. Так управление будет точнее, а экономия энергии — больше.
Для запуска процедуры устанавливаем F1-37 = 1 — статическая автонастройка и нажимаем кнопку «Run» на панели управления. Через пару минут дисплей переходит в исходное состояние и частотник готов к работе.
Далее переведём управление на внешние кнопки и настроим его
В нашем случае подойдёт трёхпроводное управление, где кнопка «Стоп» осуществляет разрешение на работу, кнопка «Старт» — запуск станка, а переключатель выбирает направление вращения.

Рис.8 Схема трёхпроводного управления
Настроим эти параметры:
F0-02 = 1 — управление через клеммы управления
F0-03 = 2 — задание частоты с AI1 (потенциометр)
F4-00 = 1 — пуск
F4-01 = 2 — выбор направления движения
F4-02 = 3 — разрешение работы
F4-03 = 47 — аварийный останов
F4-11 = 3 — режим трёхпроводного управления
Теперь станок начинает оживать, реагирует на нажатие кнопок и вращение ручки скорости. Остаётся настроить время разгона, торможения и проверить на практике удобство использования. Наш частотный преобразователь настроен и готов к использованию!
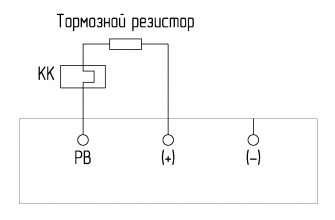
Защита и безопасность
Преобразователь частоты — умное устройство. После настройки в работу включаются все защитные функции, которые в случае аварии сберегут и сам частотник, и двигатель, и механизм.
Например, при заклинивании: преобразователь вычислит, что ток двигателя намного выше номинального, который мы установили в параметре F1-03 ранее, выдаст ошибку «Перегрузка двигателя» и отключится. Двигатель не перегреется и не сгорит, а механика останется целой.
А если возникла угроза здоровью оператора или поломки оборудования — спасет аварийная кнопка «грибок». При её нажатии преобразователь в мгновение остановит станок и отключит питание. Никто не пострадает!
Вместо заключения
Настройка частотного преобразователя — процесс увлекательный. Порой преобразователь берёт на себя не только управление двигателем, но и целой системой и может заменить даже простой контроллер. К частотнику можно подключать датчики, лампы индикации, реле и даже контакторы. Применение преобразователю можно найти везде: от насосов и конвейеров до сложных станков, подъёмников и лифтов. Главное внимательно изучать документацию и делать всё по порядку, тогда всё обязательно получится.
Источник
Настройка частотного преобразователя для регулирования давления в трубопроводе
Экономим электроэнергию и поддерживаем постоянное давление воды без водонапорной башни, задвижек и байпасной трубы. Подробно разберём как настроить частотный преобразователь Inovance MD290 и подружить его с датчиком давления.

Поддержание заданного давления в трубопроводе — типовая задача для насосной станции. Давление в трубах меняется из-за изменения потребления в разные промежутки времени. Например, ночью, когда большинство людей спит, а предприятия останавливаются, разбор воды уменьшается и давление в системе возрастает. А утром наоборот снижается, т.к вода нужна сразу всем.
Раньше для регулирования применялись ручные или автоматические задвижки. При этом насос в любом случае работал на максимум. Теперь для регулирования давления используют частотный преобразователь. Попробуем разобраться, как это работает на примере Inovance MD290.
Структура
Вся система состоит из 3 основных элементов: электродвигателя с насосом, частотного преобразователя и датчика давления. Датчик устанавают на трубопроводе после насоса и подключают к аналоговому входу частотника, таким образом система получается «замкнутой».

Структурная схема «ПИД-регулятора»
ПИД-регулятор
ПИД (пропорционально-интегрально-дифференциальный) регулятор является центральным узлом замкнутой системы регулирования. С его помощью можно поддерживать не только давление, но и любой другой технологический параметр: температуру, расход, уровень.
ПИД-регулятор работает по принципу непрерывного сравнения двух величин, поступающих на его входы — сигнала задания и сигнала обратной связи от датчика. Разницу между показаниями называют рассогласованием или ошибкой.
В случае, когда значение задания превышает значение от датчика, регулятор увеличивает выходную частоту преобразователя частоты, увеличивая скорость работы электродвигателя и производительность насоса. Если же обратная связь оказывается больше задания, регулятор снижает выходную частоту и скорость двигателя. Давление таким образом поддерживается постоянным.
Датчик
От типа датчика давления зависит схема подключения и настроки преобразователя. Для нас важны параметры: тип сигнала, количество проводов подключения, и напряжение питания.
Тип сигнала подойдёт 0…10В, 0…20мА, 4…20мА. Мы рекомендуем 4…20мА, т.к такой сигнал устойчив к помехам и позволяет определить обрыв провода. Частотный преобразователь определяет тип сигнала в зависимости от положения перемычки J9 на плате управления. Для правильного функционирования с сигналом 4…20мА перемычка должны быть установлена в положение «I» — токовый сигнал. Если перемычка стоит неправильно, то частотный преобразователь будет считывать значения неверно. Неисправность будет определить сложно, т.к. частотник не покажет ошибки.
Количество проводов подключения
Датчик давления может быть двух или трёхпроводный, другие схемы используются крайне редко.
Двухпроводное подключение используется для датчиков с токовым сигналом 0(4)…20мА, их ещё называют «токовой петлей». В этом случае и питание, и сигнал передаются всего по 2 проводам.

Двухпроводное подключение датчика.
В трехпроводной схеме питание и сигнальный провод разделены. Такие датчики могут работать как с токовым сигналом, так и с сигналом по напряжению 0…10В.

Трехпроводное подключение датчика.
Напряжение питания в частотном преобразователе 24В DC, соответственно и датчик нужно использовать с подходящим напряжением питания. Встречается несколько разновидностей: 9…36В, 8…24В, 12…36В.
Подключение
Мы будем использовать первый попавшийся двухпроводный датчик давления с напряжением питания от 9 до 36В и выходом 4…20мА.
 » >
» >
У MD290 два аналоговых входа. AI1 поддерживает сигнал 0…10В, AI2 поддерживает сигналы 0…10В, 0…20мА и 4…20мА. Мы будем использовать AI2. Для работы с токовым сигналом 0…20мА и 4…20мА необходимо установить перемычку J4 в положение «I».
Подключим датчик к аналоговому входу AI2. При этом «+» датчика подключается к клемме «+24В», а «-» к входу «AI2». Между клеммами COM и GND необходимо установить перемычку.
Скоростью управляет датчик, поэтому для управления ПЧ не хватает только кнопки «пуск» или команды на запуск от ПЛК. Нас интересует вариант «попроще», поэтому подключаем кнопку «Пуск» к дискретному входу DI1.

Подключение цепей управления
Настройка
Настройку можно разделить на 2 части: базовое параметрирование и настройка ПИД-регулятора.
Вводим данные электродвигателя
F1-01 = 22 кВт — номинальная мощность двигателя
F1-02 = 380 В — номинальное напряжение двигателя
F1-03 = 42 А — номинальный ток двигателя
F1-04 = 50 Гц — номинальная частота двигателя
F1-05 = 1460 об/мин — номинальная скорость двигателя
Изменяем закон управления и команду запуска
F0-01 = 2 — скалярный закон регулирования (U/f)
F0-02 = 1 — команды управления через клеммы
F0-03 = 8 — задание частоты от ПИД регулятора
F4-00 = 1 — команда “Пуск”
Дополнительные параметры
Важны для правильного функционирования системы.
F0-14 = 20 Гц — нижнее ограничение заданной частоты. Задается, чтобы не допускать работу насоса на слишком низкой частоте, опасной перегревом.
F0-17 = 3 сек. — время разгона
F0-18 = 3 сек. — время торможения
F6-10 = 1 — торможение на свободном выбеге
Настраиваем ПИД-регулятор
FA-00 = 0 — дискретная уставка задания ПИД регулятора через FA-01.
В качестве задания может использоваться аналоговый вход частотника, импульсный вход или даже сетевой протокол. Дискретная уставка — самый простой способ, рассчитанный на поддержание определенного давления.
FA-01 = 50% — уставка задания в % от диапазона датчика.
Если весь диапазон датчика давления 0…10 бар, то уставка в 50% задает необходимое давление = 5 бар.
FA-02 = 1 — обратная связь ПИД регулятора.
В этом параметре выбирается тот аналоговый вход, к которому подключен датчик давления, в нашем случае это AI2.
FA-03 = 0 — прямое направление работы ПИД-регулятора.
Подразумевает увеличение выходной частоты при увеличении рассогласования. В случае обратного направления работы ПИД регулятора, он будет увеличивать выходную частоту при уменьшении рассогласования.
Важным моментом является масштабирование входного сигнала AI2. Т.к аналоговый вход рассчитан на сигнал 0…20мА, а датчик давления на 4…20мА, их необходимо привести в соответствие. Для этого проведем настройку кривой AI2 так, чтобы 4мА соответствовало 0%, а 20мА — 100%.
F4-18 = 2
F4-19 = 0
F4-20 = 10
F4-21 = 100
 » >
» >
Настроим «режим сна»
Ещё одним важным преимуществом регулирования давления с помощью частотного преобразователя, кроме автоматизации процесса, является энергосбережение. Зачастую для поддержания необходимого давления достаточно поддерживать минимальную скорость насоса или вовсе его останавливать. Для этого в частотнике предусмотрена функция сна. При достижении задания порогового значения, частотный преобразователь снижает выходную частоту до нуля и “засыпает”.
Как только давление в системе падает ниже определенного уровня и задание вырастает, частотник “пробуждается” и продолжает работу. Таким образом возможно достичь экономии электроэнергии до 30% относительно регулирования без частотного преобразователя.
F8-49 = 22 Гц — частота пробуждения
F8-50 = 10 сек — время задержки пробуждения
F8-51 = 21 Гц — частота засыпания
F8-52 = 10 сек — время задержки засыпания
 » >
» >
Заключение
Применение частотных преобразователей для насосного оборудования решает сразу несколько задач: автоматизация процесса, защита двигателей и самого насоса от аварий и поломок, устранение гидроударов во всей системе.
А если систему расширить с помощью программируемого контроллера, то открывается ещё больше возможностей. Это и каскадные пуск насосной станции, и чередование насосов по наработке, и удаленное управление через сетевые протоколы.
Источник