- Теория работы и расчёт неизолированного понижающего преобразователя. Часть 1. Введение. Теоретические основы buck-конвертера
- DC/DC-преобразователи: принципы работы и уникальные решения Maxim Integrated
- Сравнение линейного и импульсного способов преобразования
- Принцип работы импульсных преобразователей
- Понижающий преобразователь
- Повышающий преобразователь
- Особенности преобразователей nanoPower
- Заключение
Теория работы и расчёт неизолированного понижающего преобразователя. Часть 1. Введение. Теоретические основы buck-конвертера
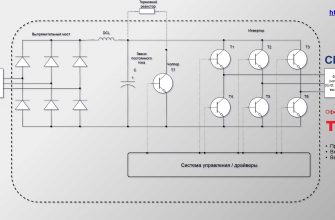
Итак, buck-конвертер (англ. buck-converter, также известен в англоязычной литературе как chopper, хотя тут полный бардак, поскольку так же, чоппером, иногда называют только силовую часть этого чуда или даже только силовой транзистор) относится к импульсным понижающим (step-down) преобразователям и строится по следующей типовой схеме:
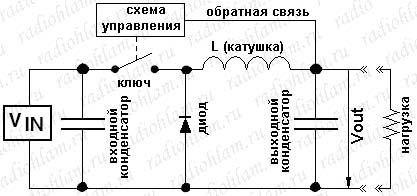
Как можно видеть на рисунке, — конвертер состоит из дросселя, диода, ключа, входного и выходного конденсаторов и схемы управления.
Сначала давайте обсудим в чём тут идея.
Как все понимают, — если источник напряжения постоянно подключен к нагрузке, то энергия от источника питания постоянно перекачивается в нагрузку. Идея, нашего преобразователя заключается в том, чтобы энергия от источника питания к преобразователю передавалась не постоянно, а порциями (импульсами), по одной порции за период. Преобразователь эту полученную порцию энергии размазывает на весь период, в результате чего его выходное напряжение получается меньше, чем напряжение источника питания. Более того, регулируя размер передаваемой за период порции (то есть ширину импульса и паузы), можно регулировать величину выходного напряжения. Вот и вся идея.
Исходя из вышеописанной идеи думаю становится понятным и назначение различных элементов преобразователя. Ключ предназначен для подключения и отключения источника питания. В качестве ключа обычно используется полевой или биполярный транзистор. Схема управления решает в какие моменты времени производить переключения ключа, то есть фактически решает – какую порцию энергии нужно от источника питания забрать. Чаще всего схема управления принимает «решение» анализируя напряжение на выходном конденсаторе (это называется управление по напряжению).
Такое управление, когда в зависимости от чего-то регулируется ширина импульса и паузы, называется ШИМ (широтно-импульсной модуляцией) и, соответственно, так же, «шимами» или «шимками», называются микросхемы, которые это управление осуществляют. Будем считать, что у нас микросхема работает с фиксированной частотой и управление происходит как раз по напряжению.
Далее, зачем нужны катушка индуктивности и выходной конденсатор? Очень просто — они как раз и «размазывают» энергию, полученную от источника питания, на весь период. Когда преобразователь подключен к источнику питания — он запасает получаемую энергию в магнитном поле катушки и электрическом поле выходного конденсатора, а когда отключен — отдаёт эту запасённую энергию в нагрузку.
Так, так, так. Раз преобразователь запасает энергию в конденсаторе, а потом отдаёт — значит напряжение на конденсаторе всё таки меняется? Да, меняется, это называется пульсации и никуда от них в импульснике не денешься, но давайте вспомним, что напряжение на конденсаторе связано с запасённой конденсатором энергией соотношением: E=CU 2 /2 или по другому:  . Отсюда понятно, что если у нас достаточно большая ёмкость и достаточно маленькое изменение энергии за период, то изменение напряжения на конденсаторе тоже будет очень маленьким.
. Отсюда понятно, что если у нас достаточно большая ёмкость и достаточно маленькое изменение энергии за период, то изменение напряжения на конденсаторе тоже будет очень маленьким.
На этом с вводной философской частью закончим и перейдём к точному математическому анализу.
На рисунках ниже показано как течёт ток в зависимости от состояния ключа (толстыми линиями обозначены пути протекания тока). Схема управления не показана, она обычно потребляет мизерный ток и мы её пока рассматривать не будем, будем рассматривать только силовую часть.

Пусть мы имеем установившийся режим работы. Нарисуем для этого режима графики напряжения в точке А (после ключа, на катоде диода) и токов через ключ, диод и катушку. Напряжение источника питания обозначим Vin, а выходное напряжение преобразователя – Vout. Будем считать, что пульсации выходного напряжения незначительны и выходное напряжение можно считать постоянным.
Когда ключ замкнут (левый рисунок) – напряжение на катоде диода равно напряжению питания, соответственно, — падение на катушке постоянно и равно Vin-Vout. Диод в это время закрыт, поскольку напряжение на катоде больше, чем на аноде. Ток и напряжение на катушке связаны соотношением V = -Ldi/dt, проинтегрировав это выражение найдём как изменяется ток через катушку: I=(Vin-Vout)*t/L – это уравнение прямой линии, угол наклона которой зависит от разницы входного и выходного напряжений (Vin-Vout) и индуктивности. Чем больше индуктивность – тем меньше угол наклона, чем меньше индуктивность – тем больше угол наклона. Ток через ключ равен току через катушку (ну потому что тут только один путь, по которому ток течёт в катушку – от источника питания через ключ, диод у нас как вы помните закрыт).
Когда ключ разомкнут (правый рисунок) – напряжение на катушке опять же постоянно и равно -Vout. Как известно – ток через катушку не может измениться скачком, поэтому в момент закрытия ключа скачком меняется напряжение на катоде диода, что приводит к его открытию и к тому, что напряжение на катоде диода становится равно нулю (пока будем считать, что диод идеальный и падение на нём равно нулю). Соответственно напряжение на катушке равно 0-Vout=-Vout. То есть, зависимость тока от времени в этом случае будет определяться следующим уравнением: I=-Vout*t/L. В данном случае ток через ключ равен нулю, а ток через диод равен току через катушку.
Итак, для напряжения в т.А и токов, имеем:
для замкнутого ключа: V=Vin, I=(Vin-Vout)*t/L, ток течёт через катушку и ключ
для разомкнутого ключа: V=0, I=-Vout*t/L, ток течёт через катушку и диод
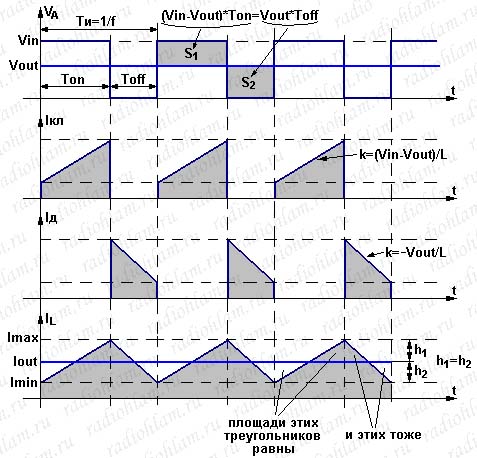
- Tи – период импульсов
- Ton – время, в течении которого ключ замкнут (ширина импульсов)
- Toff – время, в течении которого ключ разомкнут (ширина пауз)
- Iкл – ток через ключ
- Iд – ток через диод
- IL – ток через катушку
Выходной ток равен среднему току через катушку, а выходное напряжение – среднему напряжению в т.А.
Посмотрим, что нам это даёт:
1) Среднее за период напряжение в т.А равно выходному напряжению Vout, поскольку у катушки нет активного сопротивления (мы же пока идеальные элементы рассматриваем) и среднее падение на ней за период равно нулю, то есть: Vin*Ton+0*Toff=Vout*(Ton+Toff), отсюда:
2) Поскольку у нас установившийся режим, то за время замкнутого состояния ключа ток в катушке вырастает настолько же, насколько он спадает за время разомкнутого состояния (иначе бы у нас менялся выходной ток). То есть (Vin-Vout)*Ton/L=Vout*Toff/L, отсюда:
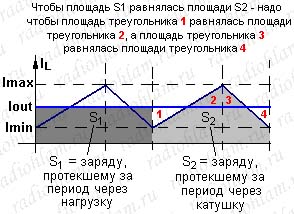
Кроме того, очевидно, что график, соответствующий среднему току, должен проходить по серединам рёбер нашей пилы, потому что только в этом случае площади отмеченных на графике треугольников будут равны. Почему эти площади должны быть равны? Потому что площадь под графиком тока от времени — это заряд. А заряд, протекший за период через нагрузку, должен быть равен заряду, протекшему за период через катушку индуктивности (смотрим на рисунок справа). Соответственно, высота h1 равна высоте h2 (раз уж у равных по площади прямоугольных треугольников,
с одинаковыми углами, равны гипотенузы). Таким образом, для токов можно записать: Iout=(Imax+Imin)/2.
Теперь давайте подумаем, что происходит, когда график тока через катушку расположен выше графика выходного тока?
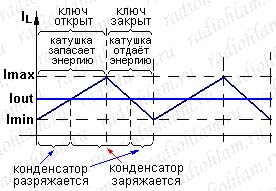
В это время через катушку проходит больше заряда, чем уходит в нагрузку. Соответственно, когда график тока через катушку расположен ниже графика выходного тока — через катушку проходит меньше заряда, чем уходит в нагрузку. Куда же девается и откуда берётся «лишний» заряд? Всё очень просто — он накапливается выходным конденсатором, а потом расходуется. Вот здесь мы, кстати, натыкаемся на первую неточность большинства рисунков, объясняющих работу таких конвертеров. Помните рисунки, на которых было показано как течёт ток в зависимости от состояния ключа? Я их специально перерисовал из доступных источников как есть. Теперь, глядя на графики тока, мы видим, что в обоих состояниях ключа есть интервалы, когда выходной конденсатор заряжается и в обоих состояниях есть интервалы, когда выходной конденсатор разряжается (смотрим на рисунок слева).
Несмотря на то, что это кажется нелогичным, на самом деле всё очень даже логично. Так происходит из-за того, что ток через катушку индуктивности не может измениться мгновенно, не может мгновенно вырасти при подключении источника питания и не может мгновенно упасть при его отключении. Так что, возвращаясь к рисункам где показано как течёт ток в зависимости от состояния ключа, правильно было бы ток в конденсатор и из конденсатора вообще не рисовать, и тем более не говорить, что когда ключ замкнут — конденсатор заряжается, а когда разомкнут — разряжается. Правильный комментарий должен звучать как-то так: «Когда ключ замкнут — в преобразователь и нагрузку передаётся энергия от источника питания. Она сразу начинает запасаться катушкой (но конденсатор всё ещё подпитывает нагрузку), а позднее, когда ток через катушку превысит выходной ток, — передаваемая энергия начинает запасаться и конденсатором. Когда ключ разомкнут — энергия от источника питания в нагрузку и преобразователь не передаётся. При этом сначала начинает расходоваться энергия, запасённая в катушке (и на нагрузку и на продолжение заряда конденсатора), а потом, когда ток через катушку становится меньше выходного тока, — конденсатор тоже начинает отдавать запасённую энергию.»
Ладно, это всё чудесно, но какую практическую ценность несёт для нас понимание того, как и когда заряжается и разряжается этот самый выходной конденсатор? Да самую прямую. Мы теперь можем точно посчитать на какую величину изменяется его заряд, а значит и на какую величину будет изменяться напряжение на нём при той или иной его ёмкости. Или, если мы зададим некий допустимый уровень пульсаций, то можно посчитать — какой должна быть ёмкость выходного конденсатора, чтобы пульсации напряжения на выходе преобразователя не превышали заданный уровень.
Итак, суммарный «лишний» заряд, который должен накопить конденсатор пока ток через катушку больше выходного тока, равен площади треугольника, расположенного выше линии I(t)=Iout (треугольник, образованный маленькими треугольничками «2» и «3» на одном из вышеприведённых рисунков). Эта площадь равна:
Или, учитывая что Tи=1/f, окончательно получаем:
Тогда пульсации, обозначим их Vp-p (Vp-p=Vmax-Vout), можно найти по следующей формуле:
Или, если мы задаём допустимый уровень пульсаций и хотим посчитать ёмкость конденсатора, то получим:
Вот, собственно, и вся базовая теория описывающая наш преобразователь. Но это ещё не самое интересное. Самое-то интересное для нас что? Правильно, самое интересное, это: во-первых, понять что будет происходить если уменьшать/увеличивать различные параметры (выходную ёмкость, индуктивность, частоту…), ну и во-вторых, понять как же всё-таки рассчитывать элементы преобразователя, поскольку, если вы заметили, в вышеприведённых формулах участвуют Vin, Iout и прочие компоненты, величина которых может меняться, в связи с чем пока не понятно, какие именно значения использовать в расчётах (максимальные, минимальные, средние). Вот об этом мы поговорим во второй части нашей статьи, а построенные ранее графики очень сильно нам в этом помогут. Графический анализ вообще очень удобен своей наглядностью.
Источник
DC/DC-преобразователи: принципы работы и уникальные решения Maxim Integrated

Общий КПД импульсного преобразователя в электронных приборах малой мощности с автономным питанием снижается в основном за счет тока утечки схемы управления. Свести этот ток практически к нулю помогут интегральные DC/DC из новой серии nanoPower производства Maxim Integrated.
На сегодняшний день найти или изготовить самостоятельно высококачественный преобразователь постоянного напряжения мощностью от нескольких ватт до нескольких киловатт не представляет особой сложности. Однако питание оборудования, потребляемая мощность которого измеряется микроваттами, уже является серьезной технической проблемой, ведь при таких уровнях потребления увеличивается относительная величина «накладных расходов» в виде затрат энергии на работу схемы управления, что приводит к ощутимому снижению КПД преобразователя в целом. Кроме этого, практически во всех современных устройствах, питающихся от батарей, активно используются энергосберегающие режимы, в которых все неиспользуемые в данный момент системы отключаются от источника энергии. А это еще больше ужесточает требования к узлам питания, ведь теперь они должны иметь еще и минимально возможный ток утечки в выключенном состоянии.
При этом количество устройств с батарейным питанием с каждым годом постоянно увеличивается, а требования к ним ужесточаются. Поэтому большинство ведущих производителей электронных компонентов регулярно предлагают инженерам новые решения в этой области.
Не осталась в стороне и компания Maxim Integrated, которая не так давно представила линейку микросхем nanoPower, отличающихся сверхмалым энергопотреблением. На сегодняшний день в этой линейке присутствуют малопотребляющие операционные усилители, компараторы, датчики температуры и другие узлы, активно использующиеся в самых разнообразных радиотехнических устройствах. Конечно же, Maxim Integrated не оставил без внимания и сектор DC/DC преобразователей напряжения, разработав в рамках данного направления целые семейства специализированных микросхем с ультрамалым энергопотреблением.
Сравнение линейного и импульсного способов преобразования
Самой популярной схемой преобразователей постоянного напряжения можно назвать понижающую, ведь в реальной аппаратуре задача уменьшения напряжения возникает намного чаще, чем увеличения или изменения его полярности. Но уменьшить входное напряжение можно двумя способами: импульсным и линейным. Поскольку каждый из способов имеет свои достоинства и недостатки, а значит – и свои области применения, то разработчику необходимо их изучить.
Фундаментальную разницу между линейным и импульсным способами уменьшения напряжения можно понять из рисунка 1. Линейный стабилизатор работает по принципу резистивного делителя напряжения. Его регулирующий элемент (транзистор VT1) функционирует в активном режиме, обеспечивая такое падение напряжения между выводами коллектора и эмиттера, чтобы выходное напряжение VOUT на нагрузке RLOAD находилось в заданных пределах. Поскольку через транзистор VT1 протекает весь ток нагрузки IOUT, КПД данной схемы будет напрямую зависеть от разницы напряжений между входом и выходом (формула 1):
где РIN и POUT – соответственно, входная и выходная мощности преобразователя.

Рис. 1. Сравнение линейного и импульсного способов уменьшения напряжения
И теперь становится очевидным главный недостаток линейных стабилизаторов – чем больше разница напряжений между входом и выходом, тем меньше его КПД, причем практически вся «лишняя» мощность выделяется на регулирующем элементе VT1, что требует установки его на радиатор, размеры которого порой превосходят размеры всех остальных элементов устройства.
До недавнего времени линейные стабилизаторы строились на основе биполярных кремниевых транзисторов, у большинства из которых падение напряжения между коллектором и эмиттером физически не могло быть меньше 1 В. Для стабилизаторов с относительно высоким выходным напряжением (более 5 B) такое падение напряжения было еще вполне приемлемым, однако в современных микроконтроллерных устройствах напряжение питания которых может быть меньше 1 В, использование биполярных транзисторов в таком режиме недопустимо.
В свое время это привело к созданию линейных стабилизаторов, использующих в качестве регулирующих элементов полевые транзисторы, которые, как известно, лишены такого ограничения. Эти стабилизаторы в русскоязычной литературе получили название «стабилизаторы с низким падением напряжения», или LDO-стабилизаторы/регуляторы (Low-Drop Out Regulator). Поскольку при малой разнице напряжений между входом и выходом КПД LDO-стабилизаторов не уступает импульсным преобразователям, а их масса, габариты и уровень электромагнитных помех при этом намного меньше, они до сих пор активно используются в современной технике.
В импульсных преобразователях активный режим полупроводниковых компонентов не используется принципиально. В рассматриваемом примере (рисунок 1) транзистор VT1 работает в ключевом режиме, периодически подключая нагрузку RLOAD к источнику питания на время tON. Это означает, что выделение мощности на силовых полупроводниковых компонентах теоретически может быть сколько угодно малым и не зависит от соотношения напряжений между входом и выходом, что является главным преимуществом данных схем. К сожалению, от такого способа преобразования появляется и главный недостаток – пульсирующий характер выходного напряжения с высоким содержанием высокочастотных гармоник.
Поскольку использовать подобное напряжение для питания потребителей в большинстве случаев не представляется возможным, то на выходе импульсных преобразователей необходимо устанавливать фильтры, уменьшающие пульсации выходного напряжения. Причем в этих фильтрах должны обязательно использоваться реактивные элементы, способные накапливать энергию (активный фильтр на полупроводниковых транзисторах для этой цели не подойдет). А это означает, что импульсный преобразователь просто физически не может быть миниатюрным, ведь энергетическая емкость реактивных компонентов прямо пропорциональна массе и объему использованного в них магнитного или диэлектрического материала.
Если сравнить достоинства и недостатки линейных и импульсных преобразователей (таблица 1), то окажется, что они взаимно компенсируют друг друга. Поэтому на практике очень часто используются гибридные системы: импульсный преобразователь формирует некоторое промежуточное напряжение невысокой стабильности с относительно высоким уровнем пульсаций, а окончательная точная регулировка уже осуществляется с помощью линейных LDO-стабилизаторов.
Таблица 1. Сравнение импульсного и линейного способов преобразования
| Метод | Импульсный | Линейный |
|---|---|---|
| Соотношение входного и выходного напряжений | Любое | Выходное напряжение не может быть больше входного |
| Точность стабилизации выходного напряжения | Из-за того что энергия преобразуется «порциями», точность выходного напряжения зависит от характера переходных процессов и метода стабилизации | Теоретически не ограничена. Практически определяется уровнем шумов и стабильностью характеристик используемых компонентов |
| Уровень пульсаций выходного напряжения | Высокий. При использовании некоторых методов управления (гистерезисных) принципиально не может быть низким | Теоретически может быть сколь угодно малым. Практически ограничен быстродействием используемых компонентов |
| Уровень электромагнитных помех | Высокий из-за высоких скоростей изменения напряжений и токов | Теоретически может быть сколь угодно малым |
| КПД | Высокий | Определяется разностью напряжений между входом и выходом |
| Масса и габариты | Зависят от частоты преобразования. Обычно больше, чем у линейных преобразователей | Зависят от уровня рассеиваемой мощности. При малых мощностях могут быть микроскопическими |
| Сложность схемы | Сложная | Относительно простая |
| Стоимость | Относительно высокая | Низкая |
| Основная сфера применения | Преобразователи с высоким соотношением входного и выходного напряжений, преобразователи рода тока, многоканальные преобразователи и прочие | Стабилизаторы для узлов, требующих прецизионного выходного напряжения с низким уровнем пульсаций и электромагнитных помех |
В современном оборудовании линейные преобразователи в основном используются для питания маломощных узлов, требующих высококачественного выходного напряжения с низким уровнем пульсаций, а также в приложениях, чувствительных к уровню электромагнитных помех, а импульсные – во всех остальных случаях (по возможности).
Однако у линейных преобразователей есть один серьезный недостаток, который в ряде случаев делает их использование невозможным – выходное напряжение линейного преобразователя принципиально не может быть больше входного. А это означает, что в случаях, когда напряжение необходимо увеличить или изменить его полярность, импульсный способ преобразования является практически безальтернативным.
Принцип работы импульсных преобразователей
На сегодняшний день существует множество импульсных преобразователей постоянного напряжения, отличающихся количеством и типом реактивных компонентов, алгоритмами преобразования и прочими характеристиками. Однако наиболее простыми, а следовательно, и наиболее популярными являются всего четыре схемы: понижающая, повышающая, инвертирующая и обратноходовая (рисунок 2). Эти преобразователи используют одинаковый принцип работы, имеют идентичное количество компонентов и отличаются лишь способом коммутации накопительного дросселя L1, от режима работы которого и зависят все характеристики схемы.

Рис. 2. Схемы наиболее популярных преобразователей
Преобразование электрической энергии происходит в два этапа. На первом этапе ключ S1 замыкается, и к дросселю L1 прикладывается некоторое напряжение VL1, под действием которого за время tON его ток возрастает на величину dI1 (формула 2, рисунок 3):
где L1 – индуктивность обмотки, активной на первом этапе.
При этом к диоду VD1 приложено напряжение обратной полярности, поэтому ток через него не протекает. В конце этого интервала ток дросселя достигает максимального значения IMAX1, а это значит, что в его магнитопроводе накапливается энергия E (формула 3):

Рис. 3. Диаграммы напряжения и тока дросселя различных преобразователей
Поскольку на первом этапе энергия в дросселе увеличивается, то его очень часто называют этапом накопления или заряда дросселя.
После размыкания ключа S1 на выводах всех обмоток дросселя формируется ЭДС самоиндукции, полярность которой противоположна полярности, присутствовавшей на первом этапе, это означает, что дроссель L1 теперь становится не потребителем, а источником электрической энергии. Изменение полярности напряжения на обмотках приводит к открытию диода VD1, который и обеспечивает путь протекания тока на втором этапе, называемом этапом возврата, или разряда дросселя.
Поскольку количество энергии в дросселе в момент коммутации ключей не изменяется, то ток в его активной обмотке сразу после размыкания ключа S1 также будет максимальным, однако его величина IMAX2 может измениться, ведь он теперь может протекать уже по другому количеству витков (формула 4):
где L2 – индуктивность обмотки, активной на втором этапе.
Дроссель понижающей, повышающей и инвертирующей схем обычно содержит только одну обмотку, поэтому L1 = L2, а значит и IMAX1 = IMAX2 = IMAX. А вот для обратноходовой схемы индуктивности L1 и L2 чаще всего отличаются, поэтому ток IMAX2 можно определить (формула 5), приравняв формулы 3 и 4 :
где N1 и N2 – количество витков, соответственно, первичной и вторичной обмоток.
Вторую часть формулы 5 можно легко получить, вспомнив, что индуктивность обмотки пропорциональна квадрату количества витков (формула 6):
где AL – конструктивный параметр магнитопровода.
После открытия диода напряжение на обмотке дросселя фиксируется на уровне VL2, под действием которого ток дросселя за время tOFF уменьшится на величину dI2 (формула 7):
В квазиустановившемся режиме, когда отсутствуют какие-либо переходные процессы как в цепях питания, так и в цепях нагрузки, дроссель на втором этапе преобразования должен отдать всю энергию, накопленную на первом интервале. Это означает, что к моменту начала следующего цикла его ток должен быть таким же, как и в начале предыдущего. Для схем с однообмоточным дросселем dI1 = -dI2, но в общем случае (для обратноходового преобразователя) изменения токов обмоток определяются Законом полного тока (формула 8):
Подставляя в формулу 8 соотношения 2 и 7, с учетом 6, можно получить основное уравнение 9, связывающее величины напряжений на выводах обмоток дросселя с отношением длительностей основных этапов преобразования:
Формула 9 является основой для получения регулировочной характеристики преобразователя – зависимости выходного напряжения от относительной длительности первого этапа преобразования D = tON/(tON + tOFF). Однако для того чтобы получить эти зависимости, далее необходимо рассматривать каждую схему в отдельности.
Понижающий преобразователь
Понижающий преобразователь (Step-Down Converter, Buck Converter) обычно имеет только одну обмотку, поэтому N1 = N2. На первом этапе преобразования к дросселю приложена разница входного и выходного напряжений (VL1 = VIN – VOUT), а на втором – только выходное напряжение (VL2 = VOUT), как показано на рисунке 4. Подставляя эти значения в формулу 9, получим формулу 10:

Рис. 4. Принцип работы понижающего преобразователя
Из формулы 11 видно, что выходное напряжение VOUT понижающего преобразователя не может превышать входное VIN, иначе левая часть уравнения станет отрицательной, к дросселю на обоих этапах преобразования будет приложено однополярное напряжение, и схема работать не будет.
Повышающий преобразователь
Повышающий преобразователь (Step-Up Converter, Boost Converter) также обычно строится на основе однообмоточного дросселя (N1 = N2). На первом этапе преобразования, когда ключ S1 замкнут, к обмотке дросселя приложено полное напряжение питания (VL1 = VIN), а вот на втором есть разница между входным и выходным напряжениями (VL1 = VOUT – VIN), как показано на рисунке 5. Подставляя эти значения в формулу 9, получим формулу 12:
Из формулы 12 теперь можно получить уравнение для регулировочной характеристики (формула 13):

Рис. 5. Принцип работы повышающего преобразователя
Как и в понижающем преобразователе, формула 13 накладывает ограничения на соотношение напряжений VIN и VOUT. При VOUT VOUT)» width=»400″ height=»523″/>
Рис. 8. Понижающий преобразователь с автотрансформаторным включением дросселя, работающий при большой разнице напряжений (VIN >>VOUT)
Особенности преобразователей nanoPower
Как видно из принципа работы, максимальное значение КПД импульсных преобразователей теоретически не ограничено. Но на практике всегда будут потери из-за неидеальности элементной базы, поэтому реальное значение КПД силовой части у наилучших представителей импульсных преобразователей находится на уровне 98…99%.
Однако при расчете КПД преобразователя в целом следует учитывать также и затраты энергии на работу схемы управления. Если рассмотреть структурные схемы контроллеров, реализующих два наиболее популярных на сегодняшний день метода управления – по напряжению (рисунок 9) и по току (рисунок 10), – то можно увидеть, что для обеспечения выходного напряжения необходимого качества требуется достаточно большое количество узлов. И хоть на сегодняшний день технологии изготовления полупроводниковых микросхем находится на очень высоком уровне, тем не менее, когда мощность силовой части преобразователя ничтожно мала, ток потребления узлов управления может оказаться соизмеримым с током нагрузок.

Рис. 9. Контроллер преобразователя с методом управления по напряжению

Рис. 10. Контроллер преобразователя с методом управления по току
У контроллеров преобразователей постоянного напряжения можно выделить три основных тока, на которые следует обращать внимание при выборе: ток, потребляемый от входной IQINT, выходной IQOUT цепи в активном режиме и ток утечки ISDT, потребляемый микросхемой в выключенном состоянии (рисунок 11). Эти токи, по возможности, должны быть минимальными, ведь чем они меньше – тем выше КПД преобразователя.

Рис. 11. Пути протекания токов IQINT, IQOUT и ISDT микросхемы MAX17222
Из этих параметров наиболее важным для устройств с батарейным питанием является ток утечки ISDT. И связано это с их спецификой работы, ведь как показывает практика, большую часть времени они находятся либо в спящем (дежурном), либо в выключенном состоянии. Поскольку физически отключить схему управления преобразователя от источника питания в большинстве случаев не представляется возможным, ток утечки ISDT будет напрямую влиять на время автономной работы.
В интегральных преобразователях постоянного напряжения nanoPower основной технологией уменьшения токов IQINT, IQOUT и ISDT является тщательная проработка схемотехники внутренних узлов контроллера и процессов изготовления интегральных компонентов. Из других методов уменьшения собственного энергопотребления можно также выделить отключение резистивного делителя выходного напряжения, используемого в цепи обратной связи. Все это позволило добиться впечатляющих значений собственного энергопотребления этих узлов. Так, например, для микросхем повышающих преобразователей MAX17220/21/22/23/24/25 ток, потребляемый от цепей нагрузки (IQOUT), не превышает 300 нА, а токи, потребляемые от источника питания (IQINT, ISDT) равны всего 0,5 нА.
Кроме этого, повышающие преобразователи имеют одну специфическую особенность, на которую также необходимо обращать внимание. При использовании в качестве верхнего ключа полупроводниковых диодов или n-канальных MOSFET становится невозможным полное отключение выходного напряжения – при остановке преобразователя на его выходе присутствует напряжение питания, которое приводит к увеличению энергопотребления. Поэтому в микросхемах nanoPower реализована также технология True Shutdown, блокирующая появление напряжения на выходе преобразователей при их отключении.
На сегодняшний день в линейку малопотребляющих преобразователей nanoPower входят микросхемы для наиболее популярных схем преобразователей: понижающего и повышающего типов (таблица 2). Линейка повышающих преобразователей MAX17220…25 (рисунок 12) позволяет обеспечить нагрузку выходным напряжением 1,8…5 В, устанавливаемым путем выбора внешнего резистора RSEL с шагом 0,1 В. Входное напряжение при этом может находиться в диапазоне 0,4…5,5 В.
Высокая степень интеграции позволила использовать для микросхем MAX17220…25 миниатюрные шестивыводные корпуса WLP и µDFN и обойтись минимальным количеством внешних компонентов. Как видно из рисунка 12, кроме обязательных внешних реактивных элементов – конденсаторов CIN, COUT и накопительного дросселя, которые, во-первых технологически сложно изготовить в интегральном исполнении, а во-вторых, их параметры зависят от конкретного приложения, для работы микросхем требуется единственный внешний прецизионный (с точностью 1%) резистор RSEL, отвечающий за величину выходного напряжения.
Таблица 2. Характеристики микросхем nanoPower
| Наименование | Ток, потребляемый от выходных цепей IQOUT, нА | Ток, потребляемый в выключенном состоянии ISDT, нА | Максимальный ток накопительного дросселя, мА | Выходной ток, мА | Корпус | Отладочная плата |
|---|---|---|---|---|---|---|
| MAX38640A | 330 | 5 | 250 | 160 | WLP/6 | MAX38640EVKIT |
| MAX17220 | 300 | 0,5 | 225 | 205 | WLP/6, µDFN/6 | MAX17222EVKIT, MAX17220EVKIT |
| MAX17222 | 300 | 0,5 | 500 | 200 | WLP/6 | MAX17222EVKIT |
| MAX17223 | 300 | 0,5 | 500 | 205 | WLP/6, µDFN/6 | MAX17222EVKIT, MAX17220EVKIT |
| MAX17224 | 300 | 0,5 | 1000 | 205 | WLP/6, µDFN/6 | MAX17222EVKIT, MAX17220EVKIT |
| MAX17225 | 300 | 0,5 | 1000 | 205 | WLP/6, µDFN/6 | MAX17222EVKIT, MAX17220EVKIT |

Рис. 12. Структурная схема микросхем MAX17220…25
В микросхемах MAX17220…25 реализован метод управления по току, поэтому величина индуктивности накопительного дросселя во многом определяет величину рабочей частоты преобразователя. Для большинства приложений на основе данных микросхем можно использовать малогабаритные дроссели в корпусе 0603 индуктивностью 2,2 мкГн с максимальным током 225 мА, 500 мА или 1 А. Все это позволяет реализовывать ультракомпактные повышающие преобразователи, занимающие на печатной плате площадь, не превышающую 6,75 мм 2 .
Аналогичными характеристиками обладают и микросхемы понижающих преобразователей MAX38640/41/42/43 (рисунок 13), позволяющие понижать входное напряжение 1,8…5,5 В до величины 0,7…3,3 В (микросхемы с суффиксом А) или до 0,5… 5,0 В (с суффиксом B). Так же, как и в рассмотренных выше повышающих преобразователях, для установки выходного напряжения MAX38640…43 используется единственный прецизионный резистор RSEL, а сами микросхемы требуют всего четырех внешних компонентов.

Рис. 13. Структурная схема микросхем MAX38640…43
Для ускорения выхода продуктов на рынок компания Maxim Integrated предлагает разработчикам максимальную поддержку, не ограничивающуюся только предоставлением всей необходимой технической документации. Так, например, на официальном сайте компании присутствуют математические модели, с помощью которых можно изучить электрические процессы разрабатываемых схем в специализированных средах разработки: автономной EE-Sim® OASIS Simulation Tool на основе ядра SIMPLIS® и онлайновой EE-Sim Design And SimulationTool. Обе среды ориентированы на разработку импульсных источников питания и позволяют на основе предлагаемых шаблонов собрать виртуальный аналог разрабатываемой схемы менее чем за 5 минут.
Кроме этого, для оценки реальных возможностей микросхем nanoPower компания Maxim Integrated предлагает специализированные отладочные платы. Так, например, для микросхем MAX17220…25 доступна отладочная плата MAX17222EVKIT (рисунок 14), состоящая из двух независимых частей, содержащих одну и ту же микросхему MAX17222, но изготовленную в разных корпусах: µDFN и WLP. В каталогах Maxim Integrated присутствует также аналогичная отладочная плата MAX17220EVKIT с установленными микросхемами MAX17220 (в двух вариантах корпусов) и MAX38640EVKIT с установленной микросхемой MAX38640A в корпусе WLP.

Рис. 14. Внешний вид отладочной платы MAX17222EVKIT
Заключение
Питание от батарей является далеко не тривиальной задачей, ведь для обеспечения максимально возможного времени автономной работы необходима тщательная проработка не только силовой части, но и узлов управления. Однако, как показывает практика, эти задачи целиком и полностью ложатся на плечи производителей электронных компонентов, ведь, как видно из материалов данной статьи, конечным разработчикам остается лишь адаптировать готовые решения под конкретное приложение.
Источник