As320 лифтовой частотный преобразователь мануал

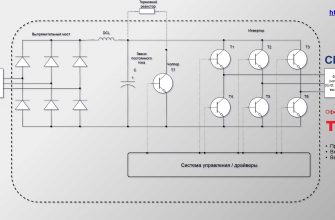
Преобразователи частоты предназначены для лифтов AS320. В преобразователь частоты встроен 32-х битный микропроцессор, высокопроизводительная схема сложной логики, и силовая установка. Преобразователь был разработан на основе технологии управления замкнутой цепью. Частотные преобразователи поддерживают различные режимы управления:
- Частотно-регулируемое управление
- Векторное управление без
- Управление по моменту вращения
Лифты под управлением преобразователя частоты работают плавно, стабильно, и эффективно, гарантируя приятную поездку пассажирам.
Преобразователи частоты разработаны по новой технологии компенсации начала движения без датчика веса, поэтому эти преобразователи частоты гарантируют мягкий старт, при этом нет необходимости в устройстве замера веса.
Для управления синхронным двигателем используется инкрементальный энкодер ABZ.
Частотный преобразователь позволяет уменьшить шум и потери в электрических двигателях за счет нового метода компенсации мертвого времени инвертора с ШИМ и технологии динамической модуляции несущей.
Благодаря улучшенной аппаратной структуре, преобразователь частоты имеет наибольшую температуру перехода -175С и при этом низкую потерю при переключении.
Модели преобразователей частоты для лифтов
Источник
Лифтовой частотный преобразователь серии AS320
1 УТВЕРЖДАЮ Генеральный директор ООО ЦНТУ «ВЕК» В. С. Молочников 2013 г. Лифтовой частотный преобразователь серии AS320 ИНСТРУКЦИЯ ПО НАСТРОЙКЕ
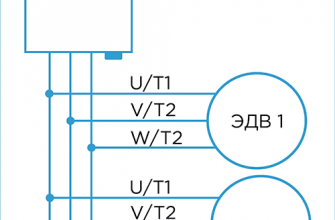
2 1 Общие сведения Преобразователь частоты AS320 (далее — ПЧ) предназначен для управления электрическими приводами лифтов. 1.2 ПЧ может использоваться с асинхронными (с обратной связью и без) и синхронными лифтовыми приводами. 1.3 ПЧ автоматически выполняет статическую авто настройку для синхронных и асинхронных приводов. 1.4 Благодаря векторному управлению осуществляется полный контроль над двигателем в диапазоне от нулевой до максимальной скорости. Стартовый момент может достигать 200%. 1.5 Более подробная информация о технических характеристиках ПЧ AS320 приведена в «AS320 series elevator-used inverter User Manual». 2 Меры безопасности 2.1 Работа с ПЧ разрешается персоналу, имеющему соответствующие профессиональную подготовку и допуск по электробезопасности соответствующего уровня, изучившему настоящее Руководство. 2.2 Профилактические работы разрешается начинать по истечении 10 минут после отключения входного питания или когда перестанет гореть индикатор зарядки или когда напряжение на шине постоянного тока упадет ниже 24 VDC. 2.3 Не выполняйте каких-либо подключений к ПЧ, когда на него подано напряжение. Не проводите проверку электронных компонентов и сигналов на платах, когда ПЧ работает. 2.4 Перед подачей напряжения убедитесь в правильном подключении ПЧ. Линии R, S и T не должны быть перепутаны с линиями U, V и W. В противном случае ПЧ может быть поврежден. 2.5 Не размещайте возле ПЧ легко воспламеняющиеся предметы или нагревательные приборы. 2.6 Для предотвращения перегрева, повреждения или возгорания ПЧ убедитесь, что помещение имеет достаточную вентиляцию. 2.7 Клемма заземления РЕ обязательно должна быть подключена к контуру защитного заземления.
3 3 Пульт управления (ПУ) LED индикаторы В верхней части лицевой панели ПУ расположены 4 LED-индикатора, обозначаемые как D1 (движение), D2 (вверх/вниз), D3 (LOC/REMOTE) и D4 (сигнал неисправности). Данные индикаторы отображают состояние лифта. Состояния индикаторов в соответствии с состоянием лифта указаны в табл.5.1. Таблица 1 — Состояния индикаторов в соответствии с состоянием лифта Состояние лифта D1 (движение) D2 (вверх/вниз) D3 (LOC/REMOTE) D4 (сигнал неисправности) Движение вверх светит светит не светит не светит Движение вниз светит не светит не светит не светит Неисправность / предупреждение Управление с пульта не светит не относится не относится мигает светит светит / не светит светит не горит 3.2 LED-монитор В верхней части манипулятора расположен LED-монитор с 4 цифровыми окнами, которые по умолчанию в реальном времени при работе показывают скорость движения. Он также может использоваться для отображения других параметров. 3.3 LCD-экран В центре манипулятора расположен LCD-экран. На нем отображаются вводимые в ПЧ параметры, параметры движения лифта и код неисправности преобразователя. 3.4 Клавиатура На клавиатуре манипулятора присутствуют 9 кнопок. Их функции описаны в таблице 2.
4 Кнопка Наименование Функции 4 Таблица 2 — Функции кнопок ENTER ESC F1 Кнопка перемещения вправо Кнопка перемещения влево Кнопка перемещения вверх Кнопка перемещения вниз Кнопка ввода Кнопка отмены Функциональная кнопка F1 При выборе функций выбирает нижнюю группу функций; При установке параметров перемещает курсор вправо При выборе функций выбирает верхнюю группу функций; При установке параметров перемещает курсор влево При выборе функций выбирает верхний функциональный код; При установке параметров увеличивает значение параметра При выборе функций выбирает нижний функциональный код; При установке параметров уменьшает значение параметра Осуществляет вход в интерфейс выбора функций из режима наблюдения; осуществляет выбор определенной функции во время работы в интерфейсе выбора функций Осуществляет выход из интерфейса выбора функций в режим наблюдения; осуществляет выход из интерфейса определенной функции работы в интерфейсе выбора функций Производит уменьшение яркости экрана в режиме наблюдения; в режиме LOCAL используется для выбора функции RUN F2 Функциональная кнопка F2 Производит увеличение яркости экрана в режиме наблюдения; в режиме LOCAL используется для выбора функции STOP F3 Функциональная кнопка F3 Переключает управление ПЧ с пульта (LOCAL) на клеммы Х0 Х7 (REMOTE) и обратно
5 3.5 Работа с пультом управления Индикация после подключения питания 5 Через 5 секунд после включения питания отображается панель режима «Наблюдение». Данная панель по умолчанию используется для отображения заданной скорости (Vref), текущей скорости (Vfbk) и текущего отклонения скорости (Vdev) Режим «Наблюдение — Monitor» В режиме «Наблюдение» с помощью кнопок ВВЕРХ, ВНИЗ, ВЛЕВО, ВПРАВО производится перемещение по панели; по умолчанию в «режиме наблюдения» можно наблюдать 10 параметров движения лифта в реальном времени. Данные параметры используются для контроля и не могут быть изменены. Таблица 3 Параметры, отображаемые в режиме «Наблюдение» Vref Vfbk Vdev DI DO Наименование Заданная скорость Текущая скорость Отклонение скорости Состояние входов X0-X7 Состояние выходов Y0-Y3 и K1, K2 Содержание Отображает заданную скорость Отображает текущую скорость Отображает отклонение текущей скорости от заданной Отображает текущее состояние клемм входов X0-X7. DI отображается как «XXXXXXXX», где Х = 0 вход не активен; Х = 1 вход активен. Отображает текущее состояние клемм выходов Y0-Y3 и K1, K2. DO отображается как «XXXXXX», где Х=0 выход не активен; Х=1 выход активен. Ед. изм. rpm rpm rpm Параметр Примечание Режим «Управление» В режиме «Наблюдение» с помощью кнопки F3 можно переключаться между режимами «Наблюдение» и «Управление», причем в состоянии «Управление» горит LED-индикатор D3 пульта. С помощью кнопки F1 можно осуществлять включение ПЧ в работу, при этом будет гореть LEDиндикатор D1. С помощью кнопки F2 можно осуществлять выключение ПЧ из работы, при этом будет мигать LEDиндикатор D1. С помощью кнопок ВВЕРХ и ВНИЗ можно осуществлять перемещение между изменяемыми параметрами. В режиме «Управление» можно изменять 2 параметра движения и наблюдать за 4 параметрами движения лифта в реальном времени. Изменять можно параметр рабочей скорости Vref и направление движения лифта Vdir. Другие 4 параметра используются для контроля и не могут быть изменены. Таблица 4 Параметры, отображаемые в режиме «Управление» Vref Vfbk Vdev Vdir Наименование Содержание Ед. изм. Заданная скорость Текущая скорость Отклонение скорости Направление движения Отображает заданную скорость Отображает текущую скорость Отображает отклонение текущей скорости от заданной Hz Hz Hz Параметр Примечание Отображает направление движения привода 0/1
6 6 Uout Выходное напряжение ПЧ Отображает выходное напряжение преобразователя V Udc Напряжение шины постоянного тока Отображает напряжение на шине постоянного тока внутреннего контура преобразователя V Рабочие режимы пульта управления Пульт управления имеет 4 рабочих режима: «установка параметров», «настройка», «проверка неисправностей», «работа с параметрами». Из режима «Наблюдение» с помощью кнопки ЕNТЕR можно войти в меню рабочих режимов и выбрать один из режимов: 1: ParaSet — установка параметров; 2: AutoTuning — настройка ; 3: FaultCheck — проверка неисправностей; 4: ParaHandle — работа с параметрами Режим «Установка параметров» Данный режим манипулятора предназначен для изменения параметров работы ПЧ. Находясь в меню рабочих режимов, выберите пункт 1: ParaSet и нажмите кнопку ENTER. Кнопками ВЛЕВОили ВПРАВО выберите необходимую группу параметров (перечень групп параметров приведен в таблице 5). Затем с помощью кнопок ВВЕРХ или ВНИЗ выберите из группы необходимый параметр. Выбрав подлежащий изменению параметр, нажмите ENTER. На изменяемом параметре отобразится еще один курсор. Перемещайтесь по разрядам параметра, передвигая курсор с помощью кнопок ВЛЕВО или ВПРАВО. С помощью кнопок ВВЕРХ или ВНИЗ увеличивайте или уменьшайте значение параметра. Нажмите ENTER, чтобы изменения вступили в силу. Если не нажать кнопку ENTER, изменения параметра не будут произведены. С помощью кнопки ESC вернитесь на один уровень меню назад — в меню рабочих режимов Режим «Настройка» В данном режиме производится самообучение ПЧ параметрам асинхронного, а также определение угла смещения фазы энкодера для синхронного вручную. Находясь в меню рабочих режимов, выберите пункт 2: AutoTuning и нажмите кнопку ENTER. ATun = X, где Х является значением для выбора соответствующего способа самообучения. Нажмите ENTER, на изменяемом параметре отобразится еще один курсор. С помощью кнопки ВВЕРХ или ВНИЗ выберите тему самообучения и подтвердите нажатием кнопки ENTER. Самонастройка параметров имеет 6 тем, в том числе: 0: Штатный режим; 1: Определение статических параметров энкодера; 2: Определение динамических параметров энкодера; 3: Окончание самообучения энкодера; 4: Определение статических параметров ; 5: Определение динамических параметров ; 6: Расширенное определение статических параметров. С помощью кнопки ESC вернитесь на один уровень меню назад — в меню рабочих режимов Режим «Проверка неисправностей» В данном режиме можно ознакомиться с 8 последними выявленными неисправностями. Находясь в меню рабочих режимов, выберите пункт 3: FaultCheck и нажмите кнопку.enter На экране появится ER0=X, где кнопками ВВЕРХ или ВНИЗ можно выбрать параметры от ER0 до ER7, где ER0 будет нести информацию о последней неисправности, а ER7 — о самой поздней неисправности из 8. Х код неисправности. Описание кодов неисправностей приведено в таблице 8. Вместе с кодом может даваться объяснение неисправности.
7 7 Выберите код неисправности и нажмите ENTER. На LCD-экран будут выведены зафиксированные на момент возникновения неисправности показатели напряжения на шине постоянного тока (Udc), выходной силы тока (Irms), заданной скорости (Vref), обратного показателя скорости (Vfbk). Нажмите ENTER, чтобы вернуться в меню кодов неисправностей. С помощью кнопки ESC вернитесь на один уровень назад — в меню рабочих режимов Режим «Работа с параметрами» В данном режиме можно производить такие операции как загрузка-выгрузка параметров, инициализация параметров, удаление ошибок. Находясь в меню рабочих режимов, выберите пункт 4: ParaHandle и нажмите кнопку ENTER. На экране появится Init = X, где Х является значением для выбора соответствующей операции. Нажмите ENTER, на изменяемом параметре отобразится еще один курсор. С помощью кнопок ВВЕРХ или ВНИЗ выберите соответствующую функцию и подтвердите нажатием кнопки ENTER. Работа с параметрами включает в себя 4 функции: 1: Выгрузка параметров из ПЧ в пульт управления /для хранения или переноса на другие ПЧ/; 2: Загрузка параметров из пульта управления в ПЧ; 7: Сброс установленных параметров /возврат к заводским установкам/; 8: Сброс ошибок. С помощью кнопки ESC вернитесь на один уровень меню назад — в меню рабочих режимов.
8 8 4 Настройка параметров ПЧ 4.1 Перечень групп параметров ПЧ приведен в таблице 5. Таблица 5 — Группы параметров Номер группы P00 P01 P02 P03 P04 P05 P06 P07 P08 P09 Назначение параметров группы Параметры пароля и основной модуль управления Параметры и преобразователя Параметры регулятора PID и регулировки пусковой и тормозной систем Параметры установки скоростей Параметры задания и компенсации крутящего момента Назначение функций дискретным входам Назначение функций дискретным выходам Определение аналоговых входов Определение аналоговых выходов и выбор параметров, отображаемых LCD и LED мониторами Дополнительные параметры Рис.1. Расположение клемм ПЧ
9 9 4.2 Введите параметры работы ПЧ и в соответствии с таблицей 6. Таблица 6 Настраиваемые параметры ПЧ Код параметра Наименование параметра Значение параметра Ед. изм. Параметры пароля и основной модуль управления Р00.02 Способ управления 3 — Р00.03 Способ задания команд управления движением Параметры и преобразователя Примечание Векторное управление с использованием датчиков скорости 1 — С клемм Х0 Х7 Р01.00 Тип 1 — Синхронный Р01.01 Номинальная мощность Р01.02 Номинальная сила тока А Р01.03 Номинальная частота Hz Р01.04 Р01.05 Номинальная скорость вращения Номинальное напряжение Р01.06 Количество полюсов — Р01.07 Р01.08 Номинальное скольжение частоты Последовательность фаз См. примечание 3 квт rpm V Hz 0 х Р01.15 Тип энкодера 1 — Sin/cos Р01.16 Количество импульсов энкодера 2048 PPr С таблички С таблички С таблички С таблички С таблички С таблички С таблички /только для асинхронных ЭД/ 1 прямая, 0 — обратная 1 прямая, Р01.19 Направление обратной связи энкодера 1 х 0 — обратная Параметры регулятора PID и регулировки пусковой и тормозной систем Р02.12 Р02.13 Р02.15 Граница переключения частот в сегменте низкой скорости F0 Граница переключения частот в сегменте высокой скорости F1 Период нахождения привода в исходном положении (Zero Speed) 20 % 60 % 1,0 s Р02.16 Период разблокировки тормозов 0,25 s Р02.19 Период падения силы тока 0,1 s Период времени от подачи команды на движение до начала набора скорости Период времени от момента подачи команды на снятие тормоза до момента растормаживания привода Время снижения силы выходного тока ПЧ до нуля с момента получения команды на останов (снятия направления движения)
10 10 Параметры установки скоростей Р03.00 Способ задания скорости 1 — Р03.01 Период ускорения Р03.02 Период замедления Р03.03 Р03.04 Р03.05 Р03.06 Период ускорения на закруглениях S- образной кривой в начале разгона Период ускорения на закруглениях S- образной кривой в конце разгона Период ускорения на закруглениях S- образной кривой в начале замедления Период ускорения на закруглениях S- образной кривой в конце замедления Р03.07 Назначение скорости 1 Р03.08 Назначение скорости 2 Р03.09 Назначение скорости 3 Р03.10 Назначение скорости 4 Р03.11 Назначение скорости 5 Р03.12 Назначение скорости 6 Р03.13 Назначение скорости 7 2 Cм. Примечание 2 1,5 Cм. Примечание 2 1,3 Cм. Примечание 2 1,3 Cм. Примечание 2 0,5 Cм. Примечание 2 0,5 Cм. Примечание 2 Cм. Примечание 1 Cм. Примечание 1 Cм. Примечание 1 Cм. Примечание 1 Cм. Примечание 1 Cм. Примечание 1 Cм. Примечание 1 Назначение функций дискретным входам s s s s s s Hz Hz Hz Hz Hz Hz Hz Многосегментное задание скорости Период ускорения от нулевой до максимальной скорости методом постоянного ускорения Период замедления от максимальной скорости до нулевой методом постоянного замедления Cкорость выравнивания (0,05 м/с) Скорость дотягивания (0,03 м/с) Малая скорость в районе этажной площадки (0,05 м/с) Скорость ревизии (0,24 м/с) Скорость перемещения на один этаж (50% номинала) Скорость перемещения на два этажа (75% номинала) Скорость перемещения более чем на два этажа (100% номинала) Р05.00 Назначение функции входу X Блокировка ПЧ Р05.01 Назначение функции входу X1 16 Запуск от аварийного источника Р05.02 Назначение функции входу X2 3 — Выбор скорости бит 0 Р05.03 Назначение функции входу X3 4 — Выбор скорости бит 1 Р05.04 Назначение функции входу X4 5 — Выбор скорости бит 2 Р05.05 Назначение функции входу X Блокировка ПЧ Р05.06 Назначение функции входу X6 7 — Выбор направления вверх
11 Р05.07 Назначение функции входу X Назначение функций дискретным выходам Выбор направления вниз Р06.02 Назначение функции выходу Y0 3 — Сигнал RUN Р06.03 Назначение функции выходу Y1 2 — Сигнал FAULT Р06.04 Назначение функции выходу Y Сигнал ZeroSpeed Назначение дополнительных функций Р09.26 Время автоматического сброса ошибки 10 sec Р09.27 Количество автоматических сбросов ошибки 5 — Р09.39 Выбор способа самообучения 1 — Промежуток времени от момента возникновения ошибки до момента ее автоматического сброса, если не превышено количество автоматических сбросов по Р09.27 Количество сбросов ошибки, выполняемых ПЧ автоматически. При превышении установленного данным параметром значения сброс ошибки осуществляется выключением питания ПЧ 0 — исключает, 1 — разрешает повторный запуск самообучения при пуске после включения питания Примечание 1. Частота двигателя на номинальной скорости рассчитываются по формуле: Víîì Kp Kïîä p f =, где 2 π Døê f частота двигателя, Гц, Víîì номинальная скорость лифта, м/с, Êð коэффициент передачи редуктора, Êïîä коэффициент подвески каната, p- количество полюсов лебедки (Р01.06), Døê диаметр шкива, м. Например: — для лебедки с асинхронным приводом с диаметром шкива 620 мм, Кр = 48, Кпод = 1 и количеством полюсов 4 для номинальной скорости 1 м/с частота двигателя должна составлять 49,3 Гц; — для лебедки с синхронным приводом с диаметром шкива 405 мм, Кр = 1, Кпод = 1 и количеством полюсов 20 для номинальной скорости 1 м/с частота двигателя должна составлять 7,86 Гц; — для лебедки с синхронным приводом с диаметром шкива 405 мм, Кр = 1, Кпод = 2 и количеством полюсов 32 для номинальной скорости 1 м/с частота двигателя должна составлять 25,16 Гц. Значения частот вращения для некоторых типов лебедок ЦНТУ «Век» приведены в Приложении 1. Примечание 2. Время ускорения P03.01 и время замедления P03.02 на S-образной кривой скорости могут регулироваться в своих диапазонах (рис.1). При выставлении минимального показателя ускорение
12 12 (замедление) будет максимальным, и это повысит скорость движения лифта, однако уровень комфортности пассажиров может понизиться. Это нужно принимать во внимание при регулировке. Рис.1. Соответствие параметров заданной скорости кривой скорости движения Примечание 3. Если на табличке не указана номинальная частота скольжения, параметр P01.07 можно рассчитать следующим образом: n p номинальная частота скольжения (Р01.07) = f,где f — номинальная частота (P01.03), n — номинальная скорость вращения (P01.04), p — число полюсов двигателя (P01.06) Настройка направления движения кабины лифта Перед началом работы лифта необходимо убедиться в правильности установленного направления движения. На направление движения влияют следующие факторы: — правильное подключение цепей, передающих сигналы направления движения вверх/вниз от системы управления к преобразователю; — правильное соединение трехфазной силовой магистрали U, V, W между преобразователем и электродвигателем; — правильное подключение сигналов обратной связи А, В энкодера для привода с синхронным электродвигателем. Проверка должна проводиться на скорости не более 0,2 м/с в режиме «Авария» Проверьте соответствие настройки параметров Р01.08 и Р01.19 соответствующим значениям в таблице 6. Убедитесь, что преобразователь частоты, заданный в КМП AS Задайте на КМП направление движения вверх/вниз. Если направление движения кабины соответствует заданному и не возникает ошибка направления движения настройка завершена Если направление движения не соответствует заданному, измените значения параметров Р01.08 и Р01.19 на противоположные (если были 0 и 1, изменяем на 1 и 0). Задайте направление движения вверх/вниз. Если направление движения кабины соответствует заданному и не возникает ошибка направления движения настройка завершена Если возникает ошибка направления движения, поменяйте местами провода FA и FB включенные в соединитель JP3 платы AS.TO24 (рис. 2). Задайте направление движения вверх/вниз. Если направление движения кабины соответствует заданному и не возникает ошибка направления движения настройка завершена. JP3 Рис.2 — Расположение клеммы JP3 на плате AS.TO24
13 Общие сведения о настройке комфортного движения лифта Настройкой параметров каждого из скоростных сегментов PID-регулятора можно добиться комфортного движения лифта. Настраиваемые параметры PID-регулятора приведены в таблице 7. Рекомендуется устанавливать минимальное значение в размере ½ от заводской настройки, максимальное значение в размере х2. Таблица 7 Код Наименование Заводские Назначение параметра Примечание параметра параметра настройки Усиление Показатель усиления регулятора PID при P02.00 низкоскоростного 130 нулевой скорости сегмента P0 P02.01 P02.02 P02.03 P02.04 P02.05 P02.06 P02.07 P02.08 P02.09 P02.10 P02.11 Усиление низкоскоростного сегмента I0 Усиление низкоскоростного сегмента D0 Усиление низкоскоростного сегмента P1 Интегрирование низкоскоростного сегмента I1 Дифференцирование низкоскоростного сегмента D1 Усиление среднескоростного сегмента P2 Интегрирование среднескоростного сегмента I2 Дифференцирование среднескоростного сегмента D2 Усиление высокоскоростного сегмента P3 Интегрирование высокоскоростного сегмента I3 Дифференцирование высокоскоростного сегмента D3 Показатель интегрирования регулятора PID при нулевой скорости Показатель дифференцирования регулятора PID при нулевой скорости Показатель усиления регулятора PID при заданной скорости ниже частоты переключения F0 Показатель интегрирования регулятора PID при заданной скорости ниже частоты переключения F0 Показатель дифференцирования регулятора PID при заданной скорости ниже частоты переключения F0 Показатель усиления регулятора PID при заданной скорости между частотой переключения F0 и частотой переключения F1 Показатель интегрирования регулятора PID при заданной скорости между частотой переключения F0 и частотой переключения F1 Показатель дифференцирования регулятора PID при заданной скорости между частотой переключения F0 и частотой переключения F1 Показатель усиления регулятора PID при заданной скорости выше частоты переключения F1 Показатель интегрирования регулятора PID при заданной скорости выше частоты переключения F1 Показатель дифференцирования регулятора PID при заданной скорости выше частоты переключения F Параметры P02.03-P02.05 являются показателями P, I и D PID-регулятора в низкоскоростном сегменте (P1, I1, D1), параметры P02.06-P02.08 являются показателями P, I и D регулятора PID в среднескоростном сегменте (P2, I2, D2), параметры P02.09-P02.11 являются показателями P, I и D регулятора PID в высокоскоростном сегменте (P3, I3, D3). Они употребляются соответственно на каждом из скоростных сегментов кривой скорости во время движения лифта (см. рис.2). Параметры P02.12 и P02.13 устанавливают частоту переключения скоростных сегментов (см. рис.2). С помощью регулировки параметров P02.03-P02.05, P02.06-P02.08 и P02.09-P02.11, а также параметров P02.12 и P02.13 можно добиться комфортного движения лифта. На рис.2 видно, что PID-регулятор ПЧ настраивается отдельно по трем скоростным участкам (сегментам), обеспечивая удобство при проведении регулировочных и проверочных операций. Если уровень комфорта при высокоскоростном режиме неудовлетворителен, можно с помощью возможностей PID-регулятора провести настройку именно высокоскоростного сегмента, не изменяя настроек других скоростных режимов. Аналогично, если неудовлетворителен уровень комфорта при среднескоростном или низкоскоростном режиме, можно изменить настройку именно 80 0, , , ,1
14 14 среднескоростного или низкоскоростного сегмента PID-регулятора. Так как для разных скоростных режимов необходимо устанавливать разные настройки параметров PID-регулятора, отдельная регулировка каждого скоростного сегмента позволяет достичь высокого уровня комфорта при движении лифта. Рис.2 Сегментирование кривой движения лифта показателями регулятора PID При увеличении коэффициента пропорциональности Р можно улучшить динамические характеристики системы. Однако превышение значения Р может привести к перерегулированию и колебаниям. Влияние коэффициента пропорциональности Р на кривую скорости приведено на рис.3. Рис.3 Влияние коэффициента пропорциональности Р на кривую скорости При увеличении интегрального коэффициента I можно улучшить скоростные характеристики системы. Например, если система перерегулирована или динамические показатели замедлены, можно соответствующим образом увеличить показатель I. Однако превышение значения I может привести к колебаниям. На рис.4 изображено влияние интегрального коэффициента I на кривую скорости. Рис.4 Влияние интегрального коэффициента I на кривую скорости При увеличении показателя дифференцирования D можно добиться повышения чувствительности системы. При этом превышение значения D может привести к превышению уровня чувствительности и колебаниям. При регулировке данного параметра сначала производится регулировка коэффициента пропорциональности Р при условии недопущения колебаний в системе. Затем производится регулировка интегрального коэффициента I, увеличивается скорость реакции системы при условии недопущения перерегулирования. И только в случае, когда регулировкой показателей P и I не удалось достичь требуемых результатов, производится соответствующая регулировка значения D. 4.5 Указания по применению операции самонастройки параметров ПЧ может в автоматически выполнять регулировку угла смещения фазы энкодера, поэтому нет необходимости выполнять операцию самонастройки вручную. При управлении синхронным электродвигателем при каждом первом пуске после подачи питания ПЧ может выполнять автоматическую регулировку угла смещения фазы энкодера. Выполнение указанной операции определяется значением параметра P09.39:
15 15 -если параметр P09.39 установлен в «0», преобразователь после подачи питания и получения команды на движение не запускает операцию самонастройки. -если параметр P09.39 установлен в «1», операция самонастройки запускается после каждой подачи питания и получения команды на движение. ВНИМАНИЕ! Если параметр P09.39 установлен в «0», при замене или энкодера необходимо установить параметр P09.39 в «1» и провести операцию самонастройки, в противном случае неправильное значение угла смещения фазы приведет к неправильной работе двигателя (рывки и вибрация). После выполнения операции самонастройки параметр P09.39 рекомендуется вернуть в «0». Операцию самонастройки для синхронного необходимо проводить в статическом состоянии, т.е. при наложенном тормозе. Во время операции нельзя отпускать тормоз, в противном случае угол смещения фазы будет определен неверно. Операция выполняется примерно 2 секунды, в связи с чем движение начинается с соответствующей задержкой. 4.6 Указания по настройке комфортного старта Перед началом работы необходимо настроить правильное направление движения лифта в соответствии с п Убедитесь, что преобразователь частоты, заданный в КМП AS Настройка должна проводиться на скорости не более 0,2 м/с в режиме «Авария» Проверьте соответствие настройки параметров Р02.15, Р02.16 и Р01.19 соответствующим значениям в таблице Задайте на КМП направление движения вверх/вниз. Если движение кабины начинается плавно, без рывков настройка не требуется. Если в начале движения кабины имеют место рывки или скольжение, переходите к п Установите значение параметра Р02.15 равным 2 сек Задайте на КМП направление движения вверх/вниз. Если в начале движения кабины имеет место скольжение, уменьшайте значение параметра Р02.16 и задавайте направление движения вверх/вниз до момента, когда скольжение будет отсутствовать Если в период от подачи команды до начала движения имеют место рывки или вибрация, настраивайте параметры Р02.00 и Р02.01 в соответствии с п Если в начале движения имеют место рывки или вибрация, настраивайте параметры Р02.03 и Р02.04 в соответствии с п По окончании настройки установите значение параметра Р02.15 в соответствии с таблицей Указания по настройке комфортного движения Перед началом работы необходимо выполнить настройку комфортного старта в соответствии с п Убедитесь, что преобразователь частоты, заданный в КМП AS Проверка настройки должна проводиться на номинальной скорости в режиме «МП» Задайте на КМП направление движения вверх/вниз. Если в процессе разгона и движения кабины на номинальной скорости нет рывков и вибраций настройка не требуется, в противном случае переходите к п Если вибрация имеет место при установившемся движении на номинальной скорости, настраивайте параметры Р02.09 и Р02.10 в соответствии с п Если вибрация имеет место при разгоне, определите скоростной сегмент (см. рис. 2), в пределах которой она происходит и настраивайте соответствующие параметры для соответствующего сегмента в соответствии с п. 4.4.
16 Указания по настройке предварительной компенсации нагрузки ВНИМАНИЕ! Предварительную компенсацию нагрузки возможно выполнять при наличии в системе оборудования для взвешивания с аналоговым выходом 0
10 В (рис. 5). Рис Перед началом работы необходимо выполнить настройку комфортного старта в соответствии с п. 4.6 и калибровку оборудования для взвешивания. Убедитесь, что преобразователь частоты, заданный в КМП AS Настройте параметры преобразователя в соответствии с таблицей 8. Таблица 8 Код параметра Наименование параметра Диапазон значений Значение параметра Р04.00 Способ задания вращающего момента 0/1/2 0 P04.01 P04.02 Способ задания компенсации вращающего момента Направление компенсации вращающего момента 0/1/2/3 3 0/1 0 P04.03 Усиление компенсации вращающего момента 0 200% 100 P04.04 Отклонение компенсации вращающего момента 0 100% 0 P07.06 Определение типа аналогового входа AI1 0/1 1 P07.07 Определение функций аналогового входа AI1 0/2/3/4 4 P07.08 Смещение сигнала аналогового входа AI1 0 20В P07.09 Усиление сигнала аналогового входа AI % 100 P07.10 Период фильтрации аналогового входа AI мс 10 Примечание 0: 0
+10B Определение направления компенсации предварительной нагрузки (параметр Р04.02). Установите значение параметра P04.02 в 0. При пустой кабине увеличивайте значение параметра P Если при увеличении указанного параметра при старте лифта уменьшается толчок вниз или увеличивается толчок вверх, направление компенсации установлено неверно. Необходимо установить значение параметра P04.02 в Настройка смещения сигнала аналогового входа AI1 Разместите в кабине груз, равный половине грузоподъемности лифта. Разместите кабину в шахте таким образом, чтобы при снятии тормоза вручную кабина с грузом и противовес находились в состоянии равновесия. С помощью пульта управления проверьте уровень сигнала на входе AI1. Если он отличается от 0В, настраивайте значение Р07.08 до тех пор, пока значение сигнала не станет равным 0±0,005В. Если значение на входе AI1 меньше нуля, значение Р07.08 нужно увеличивать, если больше нуля уменьшать.
17 Настройка старта Настройка старта заключается в подборе правильного значения параметра Р При увеличении данного значения эффект компенсации усилится путем увеличения компенсации входного сигнала соответствующего входного аналогового порта, при обратном действии эффект компенсации уменьшится. Если при старте в режиме малой нагрузки наблюдается толчок вверх (при движении вниз старт слишком затянут, при движении вверх старт слишком резок), это говорит о недостаточной компенсации — необходимо увеличить значение P Если при старте в режиме малой нагрузки наблюдается толчок вниз (при движении вверх старт слишком затянут, при движении вниз старт слишком резок), это говорит об избыточной компенсации — необходимо уменьшить значение показателя параметра P Указания по контролю сигналов управления и состояния ПЧ Переведите пульт управления в режим «Наблюдение» (см. 3.5) Кнопками ВВЕРХ или ВНИЗ выбрать экран, на котором отображается состояние дискретных входов и выходов ПЧ: === Monitor === DI = DI = Строка DI отображает текущее состояние клемм входов X0-X7: — Х0 блокировка выхода ПЧ системой управления(0-заблокирован, 1 — разблокирован); — Х1 разрешение работы от аварийного источника питания (1-разрешено, 0 — запрещено); — Х2.Х4 биты выбора скорости: скорость не выбрана (нулевая); скорость выравнивания; скорость дотягивания; скорость малая; скорость ревизии; скорость средняя; скорость повышенная; скорость высокая (максимальная); — Х5 блокировка выхода ПЧ цепью безопасности (1-заблокирован, 0 — разблокирован); — Х6 направление движения ВВЕРХ (1-выбрано, 0 не выбрано); — Х7 направление движения ВНИЗ (1-выбрано, 0 не выбрано) Строка D0 отображает текущее состояние клемм выходов K1, K2 и Y0-Y3: — Y0 — Сигнал РАБОТА ПЧ (1-есть, 0 — нет); — Y1 — Сигнал ОШИБКА ПЧ (1-есть, 0 — нет); — Y2 — Сигнал СНЯТЬ ТОРМОЗ (1-есть, 0 — нет). Примеры: === Monitor === Х0 Х1 Х2 Х3 Х4 Х5 Х6 Х7 DI = К1 К2 Y0 Y1 Y2 Y3 DI = === Monitor === Х0 Х1 Х2 Х3 Х4 Х5 Х6 Х7 DI = К1 К2 Y0 Y1 Y2 Y3 DI = DI — Задана высокая скорость вверх, выход ПЧ разблокирован. DO — ПЧ выдает сигналы РАБОТА ПЧ и СНЯТЬ ТОРМОЗ, сигнал ОШИБКА отсутствует. DI — Скорость и направление движения сняты, выход ПЧ заблокирован. DO — ПЧ выдает сигнал ОШИБКА.
18 18 5 Возможные ошибки ПЧ и способы их устранения 5.1 Возможные ошибки ПЧ и способы их устранения приведены в таблице 9. Код 1 Наименование ошибки Сработал модуль максимальной токовой защиты 2 Неисправность ADC 3 Перегрев радиатора Неисправность компонентов тормозной системы Неисправность плавкого предохранителя Превышение выходного момента силы Возможная причина Превышение конечного напряжения постоянного тока Короткое замыкание на периферии Обрыв фазы на выходе Неисправность энкодера Ошибка фазы энкодера Способы устранения Таблица 9 Проверьте электросеть и питание; проверьте, не может ли большая инерционная нагрузка затягивать время торможения лифта при высокоскоростном режиме Проверьте электродвигатель и выходные соединения на наличие короткого замыкания, а также на наличие короткого замыкания заземления Проверьте электродвигатель и выходные соединения на наличие ослабленных соединений Проверьте исправность энкодера и правильность его подключения Проверьте подсоединение фаз энкодера Ошибка фазы Проверьте подключение фаз Неточный угол смещения фазы энкодера Недостаточная сила тока во время операции самообучения Ослаблены соединения внутренних разъемов преобразователя Показатель скольжения асинхронного установлен некорректно Коэффициент тока холостого хода установлен некорректно Датчик тока неисправен Контроль тока контура неэффективен Высокая температура окружающей среды Непроходимость вентиляционных каналов Нарушение работы вентилятора Неисправность проводки контроля температуры Неисправность компонентов тормозной системы Короткое замыкание проводки внешнего тормозного сопротивления Превышение силы тока привело к неисправности плавкого предохранителя Понижено напряжение входного источника питания Проблемы вращения или серьезный скачок нагрузки Неисправность энкодера Обрыв фазы на выходе Выполнить операцию самонастройки (п.4.5) Усилить ток во время операции самонастройки путем регулировки параметра P09.40 Пожалуйста, привлекайте к профилактическим работам персонал, имеющий соответствующую квалификацию по электрике Настройте показатель скольжения асинхронного Настройте коэффициент тока холостого хода Замените датчик тока Замените панель управления Необходимо понизить температуру окружающей среды, усилить вентиляцию Очистить вентиляционные каналы от пыли, ваты и другого мусора Проверьте надежность подключения питания вентилятора или замените вентилятор Проверьте цепи контроля температуры Замените соответствующий приводной модуль Проверьте цепи тормозного резистора Проверьте контур предохранителя на обрыв и надежно соединить разъемы Проверьте напряжение и мощность входного источника питания Устраните проблемы вращения, снизить нагрузку Проверьте исправность энкодера и правильность его подключения Проверьте соединения выходов ПЧ и на ослабление контакта
19 Код Наименование ошибки 7 Отклонение скорости 8 Защита от скачка напряжения на шине (при ускорении) Защита скачка напряжения шины (при замедлении) Защита скачка напряжения шины (при постоянной скорости) 9 Низкое напряжение на шине 10 Обрыв фазы на выходе Возможная причина 19 Способы устранения Период ускорения слишком мал Увеличить период ускорения Превышение нагрузки Лимит силы тока слишком низкий Внештатная ситуация с напряжением входного источника питания Во время вращения в высокоскоростном режиме происходит повторный запуск высокоскоростного режима Превышение инерции вращения во время нагрузки Уменьшить нагрузку Увеличить показатель лимита силы тока в пределах установленного диапазона Проверьте входной источник питания Остановите электродвигатель и запустите его снова Используйте качественные соответствующие компоненты тормозной системы Период замедления слишком мал Увеличить период замедления Показатель тормозного сопротивления завышен или не подключен Внештатная ситуация с напряжением входного источника питания Превышение инерции вращения во время нагрузки Показатель тормозного сопротивления завышен или не подключен Понижение напряжения источника питания до минимального рабочего напряжения оборудования Произошло моментальное отключение питания Завышено напряжение источника питания Ослабление соединительных клемм источника питания Внештатная ситуация с внутренним переключателем источника питания Сохранение сверх нагрузки пускового тока в одинаковых системах электропитания Внештатная ситуация с выходным соединением преобразователя, нарушение надежности соединения или обрыв соединения Ослабление выходных клемм источника Мощность слишком мала, составляет 1/20 от максимальной мощности, используемой преобразователем Дисбаланс напряжений на выходе преобразователя Проверьте состояние цепей тормозного сопротивления и его сопротивление Проверить входной источник питания Используйте качественные соответствующие компоненты тормозной системы Произвести надлежащим образом подключение тормозного сопротивления Проверьте входной источник питания Проверьте входной источник питания, устраните отклонения и проведите перезапуск преобразователя Проверьте входные соединения преобразователя Пожалуйста, привлекайте к профилактическим работам персонал, имеющий соответствующую квалификацию по электрике Измените показатели систем электропитания в соответствии с установленными нормами Проверьте состояние соединений между выходом преобразователя и электродвигателем, проверьте надежность соединений, отсутствие обрывов Подобрать ПЧ соответствующей мощности Проверьте правильность всех подключений При отключенном питании проверьте состояние выходных клемм U,V,W преобразователя и клемм постоянного напряжения
20 Код Наименование ошибки Превышение силы тока при низкоскоростном режиме (при ускорении) Возможная причина 20 Способы устранения Низкое напряжение электросети Проверьте входной источник питания Неверно настроены параметры В процессе вращения происходит запуск высокоскоростного режима Настройте параметры Остановите вращение и произведите перезагрузку 11 Превышение силы тока при низкоскоростном режиме (при замедлении) Превышение силы тока при низкоскоростном режиме (при постоянной скорости) Низкое напряжение электросети Проверьте входной источник питания Превышение показателя инерции Используйте качественные соответствующие во время работы двигателя в компоненты тормозной системы режиме нагрузки Неверные настройки параметров Настройте параметры Период замедления слишком Увеличить период замедления короткий Скачок нагрузки во время движения Неверные настройки параметров При понижении нагрузки снизится частота и амплитуда Настроить параметры Неверное подключение энкодера Изменить подключение энкодера 12 Неисправность энкодера Остаточный ток после остановки лифта Обратное направление скорости во время движения Набор скорости после остановки лифта Перепутана очередность фаз Превышение скорости в заданном направлении (максимальная скорость в разрешенном диапазоне) Отсутствует выходной сигнал энкодера Обрыв соединений энкодера Неверная установка функциональных кодов Неэффективное прерывание тока во время остановки лифта Обратное направление скорости во время движения Разный порядок подключения фаз на электродвигателе и энкодере Начато неверное направление вращения во время старта, сила тока достигла предельного значения Ослаблен тормоз, эффект скольжения лифта Помехи в работе энкодера или ослабление соединений энкодера Перепутано подключение Синхронный электродвигатель в состоянии потери магнитной индукции произвел резкое повышение оборотов Операция самообучения угла смещения фазы синхронного проведена неправильно Проверить исправность энкодера и подачу питания Восстановить соединения Привести в соответствие функциональные коды преобразователя и энкодера При использовании синхронного наблюдается ощущение затягивания Проверьте параметры внешней нагрузки на наличие скачка Измените порядок подключения фаз на электродвигателе и энкодере Слишком низкий предел силы тока либо его несоответствие с предельным значением силы тока Проверьте тормоз Проверьте соединения энкодера, устраните помехи Правильно подключите соединения или перенастройте параметры Проверьте электродвигатель Повторите операцию самообучения
21 Код Наименование ошибки Превышение скорости в обратном направлении (максимальная скорость в разрешенном диапазоне) Неверный порядок подключения фаз UVW энкодера Неисправность информационных цепей энкодера Превышение силы тока abc (моментальный показатель 3 фаз) 22 Неисправность тормозной системы 23 Превышение напряжения на входе Возможная причина 21 Способы устранения Ошибка в установке параметров Проверьте цепи энкодера энкодера или помехи энкодера Превышение нагрузки в заданном направлении или Выявите внешнюю причину скачка нагрузки скачок нагрузки Синхронный электродвигатель в состоянии потери магнитной Проверьте электродвигатель индукции произвел резкое повышение оборотов Операция самообучения угла смещения фазы синхронного Повторите операцию самообучения проведена неправильно Ошибка в установке параметров Проверьте цепи энкодера энкодера или помехи энкодера Превышение нагрузки в обратном направлении или Выявите внешнюю причину скачка нагрузки скачок нагрузки Проблемы с подключением Проверьте правильность подключения энкодера энкодера или ошибка в установке или изменить параметры настройки энкодера параметров Энкодер неисправен Короткое замыкание одной из фаз с заземлением Неисправность энкодера Нарушен порядок подключения фаз энкодера Нарушен порядок подключения фаз Неправильный угол смещения фазы при операции самообучения Недостаток силы тока при операции самообучения угла смещения фазы Ошибка главного контура на приводной панели Показатель скольжения асинхронного установлен некорректно Показатель силы тока на холостом ходу установлен некорректно Не работает выходное реле Выходное реле работает, тормоз не разблокируется Сигнализатор состояния тормоза не выдает сигнал Превышение напряжения на входной магистрали Проверка переключения напряжения питания показала неисправность главного контура Проверить правильность подключения энкодера и заново произвести операцию самообучения Проверьте цепи и выходные соединения преобразователя Проверьте исправность энкодера и правильность его подключения Проверьте правильность подключения фаз энкодера Проверьте порядок подключения фаз Повторите операцию самообучения угла смещения фазы Требуется увеличение значения параметра P09.40 «Усиление силы тока при операции самообучения» Смените приводную панель Отрегулируйте показатель скольжения асинхронного Отрегулируйте показатель силы тока на холостом ходу Проверьте реле управления тормозом Проверьте силовой кабель тормозной системы на предмет надежности подключения и отсутствие обрыва Проверьте цепи контроля состояния тормоза Проверьте напряжение на входной магистрали на предмет соответствия требованиям преобразователя Пожалуйста, привлекайте к профилактическим работам персонал, имеющий соответствующую квалификацию по электрике
22 Наименование Код ошибки 24 Прерывание UVW энкодера 25 Резервный Возможная причина 22 Неисправны цепи подключения энкодера Способы устранения Ослаблены клеммы подключения либо имеются обрывы проводки 26 Не выполнена операция самообучения энкодера 27 Превышение силы тока на выходе 28 Неисправность энкодера типа SIN/COS 29 Обрыв фазы на входе Защита от превышения скорости Превышение силы тока при высокоскоростном режиме движения Неисправность защитного заземления Не выполнена операция самообучения энкодера Превышено время движения в режиме перегрузки. Чем больше нагрузка, тем короче время движения Проблемы с вращением Короткое замыкание обмотки Неисправность энкодера Неверный порядок подключения фаз энкодера Неверный порядок подключения фаз Выполнить операцию самообучения энкодера Остановите движение лифта. Если при повторном пуске также происходит превышение силы тока на выходе необходимо проверить соблюдение диапазона разрешенной нагрузки лифта Проверьте электродвигатель и тормоз Проверьте электродвигатель Проверьте исправность энкодера и правильность его подключения Проверить порядок подключения фаз энкодера Проверить порядок подключения фаз Неверный угол смещения фазы Повторить операцию самообучения с загрузкой при операции самообучения угла смещения фазы Недостаточно силы тока во время Увеличить силу тока во время операции операции самообучения самообучения путем увеличения значения смещения фазового угла параметра P09.40 Короткое напряжение на выходе Проверить соединения или электродвигатель Неисправность энкодера или ошибка в электропроводке Внештатная ситуация с входным напряжением Обрыв фазы входного напряжения Ослабление клемм входных соединений Настройки параметров энкодера неверны или присутствуют помехи Скачок нагрузки Ошибка настройки параметров защиты от превышения скорости Падение напряжения в сети Скачок нагрузки во время движения Нарушения настройки параметров Настройки параметров энкодера неверны или присутствуют помехи Ошибка подключения Внештатная ситуация с электродвигателем Проверьте энкодер и его цепи Проверьте напряжение в фазах питающей электросети Проверьте состояние клемм входных соединений Проверьте контур энкодера Проверьте и устраните внешнюю причину скачка нагрузки Проверьте настройку параметров Проверьте входной источник питания Уменьшите нагрузку, что снизит частоту и амплитуду тока Установите правильные настройки параметров Проверить цепи энкодера Выполните подключение заземления в соответствии с Руководством пользователя Замените электродвигатель, проведите проверку сопротивления изоляции
23 Код Наименование ошибки 33 Старение конденсаторов 34 Внешняя неисправность 35 Нестабильность выходного сигнала 36 Ошибка настройки параметров 37 Неисправность датчика силы тока Короткое замыкание в цепях тормозного резистора Превышение мгновенного показателя силы тока Защита от короткого замыкания IGBT Падение напряжения на входе Возможная причина 23 Превышение выходного тока преобразователя на заземление Старение конденсаторов преобразователя Поступил сигнал о внешней неисправности Внештатная ситуация на выходе преобразователя, нарушение надежности или обрыв соединения Нестабильность трех фаз Способы устранения Проверьте сопротивление изоляции Пожалуйста, привлекайте к профилактическим работам персонал, имеющий соответствующую квалификацию по электрике Выясните причину внешней неисправности Проверьте выходные соединения преобразователя в соответствии с установленными нормами, устраните нарушения надежности и обрывы соединений Проверьте электродвигатель Параметр установлен неверно Измените настройки параметров преобразователя Аппаратный сбой приводной панели Замыкание проводки внешнего тормозного сопротивления Предупреждение о превышении мгновенного показателя силы тока трех фаз Ia, Ib, Ic во время остановки лифта Короткое замыкание на выходе инвертора Недостаточная мощность источника питания вызвала падение напряжения в процессе эксплуатации Неисправность реле зарядки преобразователя Пожалуйста, привлекайте к профилактическим работам персонал, имеющий соответствующую квалификацию по электрике Проверьте цепи тормозного резистора Пожалуйста, привлекайте к профилактическим работам персонал, имеющий соответствующую квалификацию по электрике Проверьте электродвигатель и выходные соединения на наличие короткого замыкания, а также на наличие короткого замыкания заземления Проверьте мощность источника питания Обратитесь на завод-изготовитель для проведения ремонтных работ
24 24 Приложение 1 Параметры установки скоростей для лебедок типа ЦНТУ ЦНТУ-1-x-x-А (Dш = 320 мм, Кп = 1, p = 20) Таблица П.1 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 59,71 9,95 В Р03.12 Повышенная 0,75 м/с 44,79 7,46 П Р03.11 Средняя 0,50 м/с 29,86 4,98 С Р03.10 Ревизии 0,30 м/с 17,91 2,99 Р Р03.09 Малая 0,10 м/с 5,97 1,00 М Р03.08 Выравнивания 0,03 м/с 1,80 0,30 Э Р03.07 Дотягивания 0,05 м/с 3,00 0,50 Д 1,6 м/с Р03.13 Высокая 1,60 м/с 95,54 15,92 В Р03.12 Повышенная 1,20 м/с 71,66 11,94 П Р03.11 Средняя 0,80 м/с 47,77 7,96 С Р03.10 Ревизии 0,30 м/с 17,91 2,99 Р Р03.09 Малая 0,10 м/с 5,97 1,00 М Р03.08 Выравнивания 0,03 м/с 1,80 0,30 Э Р03.07 Дотягивания 0,05 м/с 3,00 0,50 Д ЦНТУ-2-x-x-А (Dш = 320 мм, Кп = 2, p = 20) Таблица П.2 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 119,43 19,90 В Р03.12 Повышенная 0,75 м/с 89,57 14,90 П Р03.11 Средняя 0,50 м/с 59,71 9,95 С Р03.10 Ревизии 0,30 м/с 35,83 5,97 Р Р03.09 Малая 0,10 м/с 11,94 1,99 М Р03.08 Дотягивания 0,03 м/с 3,58 0,60 Д Р03.07 Выравнивания 0,05 м/с 5,97 1,00 Э 1,6 м/с Р03.13 Высокая 1,00 м/с 191,08 31,85 В Р03.12 Повышенная 0,75 м/с 143,31 23,89 П Р03.11 Средняя 0,50 м/с 95,54 15,92 С Р03.10 Ревизии 0,30 м/с 35,83 5,97 Р Р03.09 Малая 0,10 м/с 11,94 1,99 М Р03.08 Дотягивания 0,03 м/с 3,58 0,60 Д Р03.07 Выравнивания 0,05 м/с 5,97 1,00 Э
25 25 ЦНТУ-1-x-x-А (Dш = 400 мм, Кп = 1, p = 20) Таблица П.3 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 47,77 7,96 В Р03.12 Повышенная 0,75 м/с 35,83 5,97 П Р03.11 Средняя 0,50 м/с 23,89 3,98 С Р03.10 Ревизии 0,30 м/с 14,33 2,39 Р Р03.09 Малая 0,10 м/с 4,78 0,80 М Р03.08 Дотягивания 0,03 м/с 1,43 0,24 Э Р03.07 Выравнивания 0,05 м/с 2,39 0,40 Д 1,6 м/с Р03.13 Высокая 1,60 м/с 76,43 12,74 В Р03.12 Повышенная 1,20 м/с 57,32 9,55 П Р03.11 Средняя 0,80 м/с 38,22 6,37 С Р03.10 Ревизии 0,30 м/с 14,33 2,39 Р Р03.09 Малая 0,10 м/с 4,78 0,80 М Р03.08 Дотягивания 0,03 м/с 1,43 0,24 Э Р03.07 Выравнивания 0,05 м/с 2,39 0,40 Д ЦНТУ-2-x-x-А (Dш = 400 мм, Кп = 2, p = 20) Таблица П.4 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 95,54 15,92 В Р03.12 Повышенная 0,75 м/с 71,66 11,94 П Р03.11 Средняя 0,50 м/с 47,77 7,96 С Р03.10 Ревизии 0,30 м/с 28,66 4,78 Р Р03.09 Малая 0,10 м/с 9,55 1,59 М Р03.08 Дотягивания 0,03 м/с 2,87 0,48 Д Р03.07 Выравнивания 0,05 м/с 4,78 0,80 Э 1,6 м/с Р03.13 Высокая 1,00 м/с 152,87 25,48 В Р03.12 Повышенная 0,75 м/с 114,65 19,11 П Р03.11 Средняя 0,50 м/с 76,43 12,74 С Р03.10 Ревизии 0,30 м/с 28,66 4,78 Р Р03.09 Малая 0,10 м/с 9,55 1,59 М Р03.08 Дотягивания 0,03 м/с 2,87 0,48 Д Р03.07 Выравнивания 0,05 м/с 4,78 0,80 Э
26 26 ЦНТУ-1-x-x-Б (Dш = 400 мм, Кп = 1, p = 32) Таблица П.5 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 47,77 12,74 В Р03.12 Повышенная 0,75 м/с 35,83 9,55 П Р03.11 Средняя 0,50 м/с 23,89 6,37 С Р03.10 Ревизии 0,30 м/с 14,33 3,82 Р Р03.09 Малая 0,10 м/с 4,78 1,27 М Р03.08 Дотягивания 0,03 м/с 1,43 0,38 Д Р03.07 Выравнивания 0,05 м/с 2,39 0,64 Э 1,6 м/с Р03.13 Высокая 1,60 м/с 76,43 20,38 В Р03.12 Повышенная 1,20 м/с 57,32 15,29 П Р03.11 Средняя 0,80 м/с 38,22 10,19 С Р03.10 Ревизии 0,30 м/с 14,33 3,82 Р Р03.09 Малая 0,10 м/с 4,78 1,27 М Р03.08 Дотягивания 0,03 м/с 1,43 0,38 Д Р03.07 Выравнивания 0,05 м/с 2,39 0,64 Э ЦНТУ-2-x-x-Б (Dш = 400 мм, Кп = 2, p = 32) Таблица П.6 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 95,54 25,48 В Р03.12 Повышенная 0,75 м/с 71,66 19,11 П Р03.11 Средняя 0,50 м/с 47,77 12,74 С Р03.10 Ревизии 0,30 м/с 28,66 7,64 Р Р03.09 Малая 0,10 м/с 9,55 2,55 М Р03.08 Дотягивания 0,03 м/с 2,87 0,76 Д Р03.07 Выравнивания 0,05 м/с 4,78 1,27 Э 1,6 м/с Р03.13 Высокая 1,60 м/с 152,87 40,76 В Р03.12 Повышенная 1,20 м/с 114,65 30,57 П Р03.11 Средняя 0,80 м/с 76,43 20,38 С Р03.10 Ревизии 0,30 м/с 28,66 7,64 Р Р03.09 Малая 0,10 м/с 9,55 2,55 М Р03.08 Дотягивания 0,03 м/с 2,87 0,76 Д Р03.07 Выравнивания 0,05 м/с 4,78 1,27 Э ЦНТУ-2-x-x-А (Dш = 240 мм, Кп = 2, p = 20) Таблица П.7 Номер Название Скорость Частота вращения шкива Обозначение в меню параметра скорости кабины, м/с в об/мин в Гц КМП 1 м/с Р03.13 Высокая 1,00 м/с 159,24 26,54 В Р03.12 Повышенная 0,75 м/с 119,43 19,90 П Р03.11 Средняя 0,50 м/с 79,62 13,27 С Р03.10 Ревизии 0,30 м/с 47,77 7,96 Р Р03.09 Малая 0,10 м/с 15,92 2,65 М Р03.08 Дотягивания 0,03 м/с 4,78 0,80 Д Р03.07 Выравнивания 0,05 м/с 7,96 1,33 Э
27 27 Приложение 2 (справочное) Модель преобразователя AS320 Мощность, квт Параметры тормозных резисторов для частотных преобразователей серии AS320 Значение сопротивления, Ом минимальное максимальное рекомендуемое Мощность резистора при рекомендованном сопротивлении, Вт синхронный двигатель асинхронный двигатель 4Т03Р7 3, Т05Р5 5, Т07Р5 7, Т Т Временная диаграмма работы привода Приложение 3 (справочное)
Источник